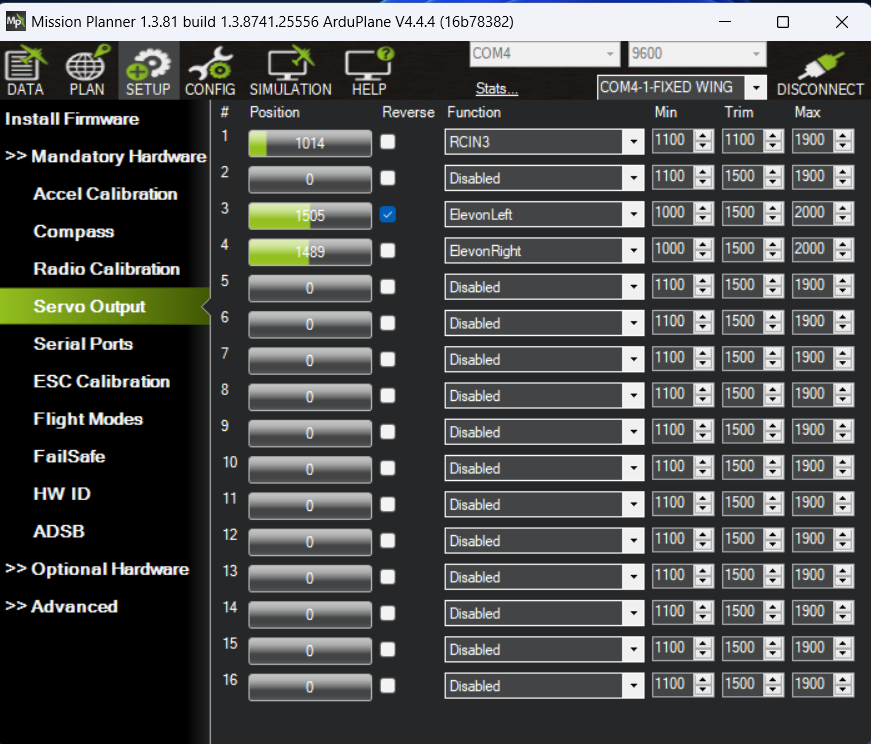
I’m a beginner, setting up a Matek F409 Wing V2 with Mission Planner. I’ve configured the firmware based on video tutorials and connected the flight controller successfully. However, the Mission Planner simulation isn’t working as expected.
The problem:
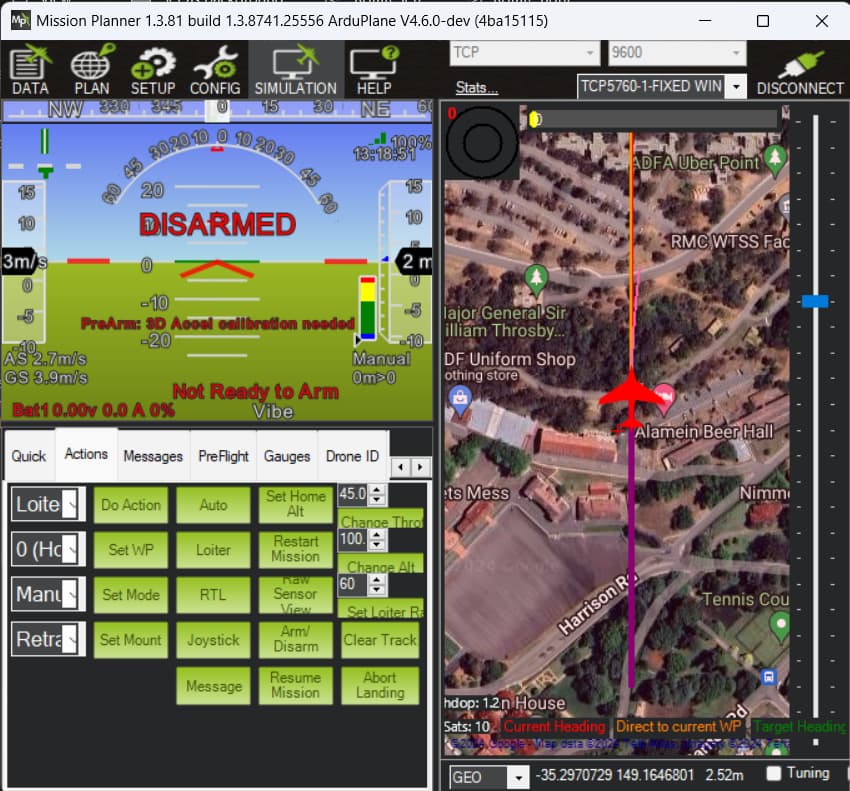
When I run the simulation, the connection changes to TCP, servo outputs (and all other parameters) change, PWM bars for the transmitter don’t listen to the transmitter actions anymore, and the simulated plane flies straight instead of following waypoints or responding to controls.
Additional Information:
I don’t have a GPS (intended for manual control).
I’m aware of SIL (Hardware-in-the-Loop) in ArduPilot documentation but lack Linux and the expertise to use it.
Questions:
Why the connection changed to TCP and all parameters changed also?
Can Mission Planner simulate without GPS?
The simulation is not necessary anymore (I will be able to fly the drone soon), but I would appreciate any suggestions for the simulation.
It’s a simulation, the Flight Controller hardware has nothing to do with it. There is no HIL with Mission planner.
You can use your Transmitter with Mission Planner for a simulation if it has USB/Joystick functionality. I do this frequently with the RadioMaster Transmitter I have. Or you can connect Game Pad/Joystick and control it that way.
Thank you so much! This explanation really clears things up for me.
Since the simulation doesn’t directly interact with the hardware, is there still value in using the Mission Planner simulation? for logging simulated data? Could this logged data be potentially usable for further analysis? In 3D simulation software like Gazeb for example? Please enlighten me.