Hello everybody,
We are trying to use make our Rover work with Mission Planner (we may use QGroundControl, but I think configuration in Mission Planner is easier.). Anyway, it is a Skid Steering vehicle (there is no steering), therefore, following the Ardupilot guide ( https://ardupilot.org/rover/docs/rover-motor-and-servo-configuration.html ), I made Servo 1 Throttle Left and Servo 3 Throttle Right . Right now, I connected only 1 motor ( it’s a brushed dc, and I used Pololu G2 driver). I am trying to make its calibration, and actually I want to know if everything is alright. My question is this:
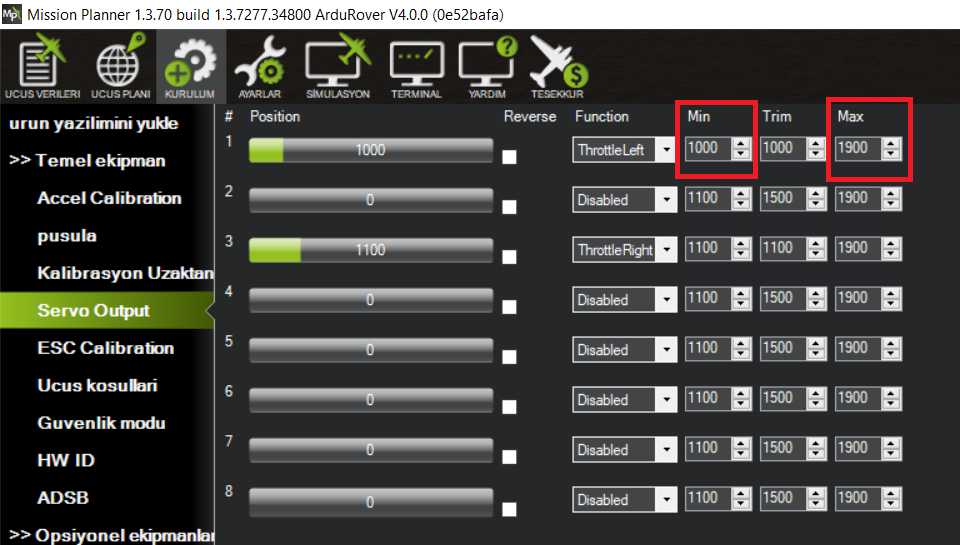
In the Servo Configuration part, if Min value is 1100 (by default it is), the motor is rotating very slowly. If I make the Min 1000 (please see the figure), it does not rotate. In that case, should I keep it at 1000? Also, what does Trim do? I didn’t even try to change it, but when I set Min to 1000, Trim changed to 1000 as well. Should I do anything about it?
My second question is, when I check the Reverse box, the direction of rotation of the motor does not change, but it rotates much faster in the same direction, at max speed. I can set a different maximum speed (by changing Max, which is 1900 ). But the thing is, direction does not change. I also tried to set Min to -1900 , so the direction would change, but it cannot be set below 800. What is your suggestion/ comment? Does everything look good? Should I keep it as 1000 - 1900, or should I do/try something else? Is Reverse part working normally?
I am quite a beginner in this stuff. My questions are pretty basic, but I want to be sure before proceeding. Thanks…