I have MP running in Mono on Ubunutu 20.04 - but am running into a issue.
I have a simulator running for this test - but I don’t think that is causing my issue.
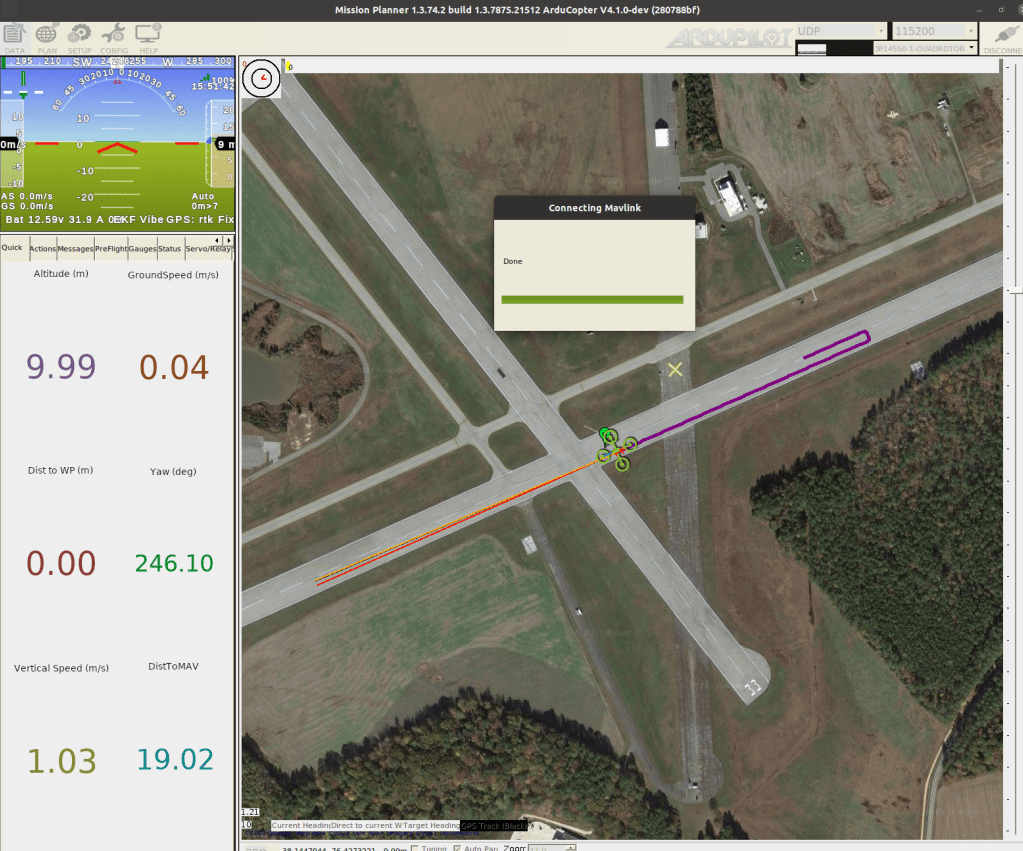
After connecting to the aircraft, I successfully get all parameters but then the “Done” dialog box does not go away. Thus, I can not interact with MP. Data in the background shows full connection and updating well. Any thoughts?
Mission Planner is working perfectly in the background too - I can observe by sending mavlink commands and see the GUI updating properly. The “Done” window just doesn’t go away and removes my ability to interact with MP.
EDIT: It seems like connecting to an actual aircraft has made the SITL connection part work too now sometimes. If I connect to an actual aircraft, disconnect, then connect to the simulator.
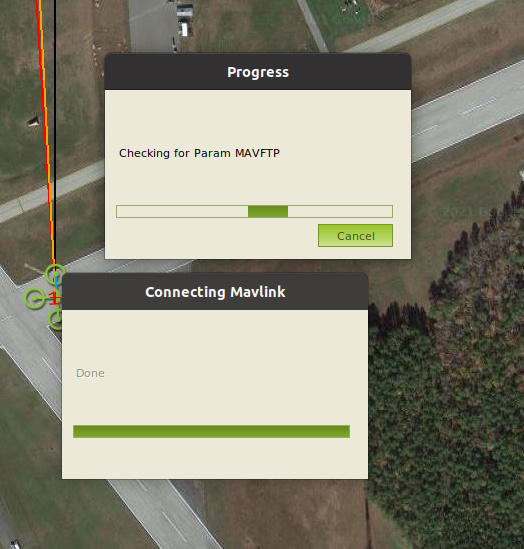
It looks like connecting to the sim opens up two windows sometimes which is where the issue arises:
I played around with this a bit more and I think I have narrowed down the issue to the exact problem.
When I boot the SITL it automatically sends out data on two streams 127.0.0.1:14550 and 127.0.0.1:14551. When MP is open it tries to connect to both streams instantaneously and then hangs on “Done” for some reason.
If I run the simulator and restrict it to only streaming out at one address MP works properly. However, as soon as I start outputting data on a second stream MP tries to connect (even though it is already connected to stream 1) and then gets stuck on “Done” again.
I do need to have two data streams being outputted via mavproxy - so I will have to find a fix eventually.
Right now my best bet has been to spam cancel as soon as MP starts automatically connecting to both IPs and then manually connect normally. Not ideal - but functional till I figure out the bug.
This doesn’t work 100% of the time though - I run into very slow parameter loading sometimes followed by a “Failed to Connect”.
I am facing the same problem; seems to be a problem with UBUNTU 20 ( not sure though as the same works like a charm with UBUNTU - 18). I am ON it will update if i find a work around.