I am using Rover 4.1 and have finished successfully calibrating the radio, accels and compass on a Pixracer.
My steering and mode controls work, but I cannot use the throttle control. I see the input moving in the Mission Planner status screen, but the output never leaves the center position (1500us).
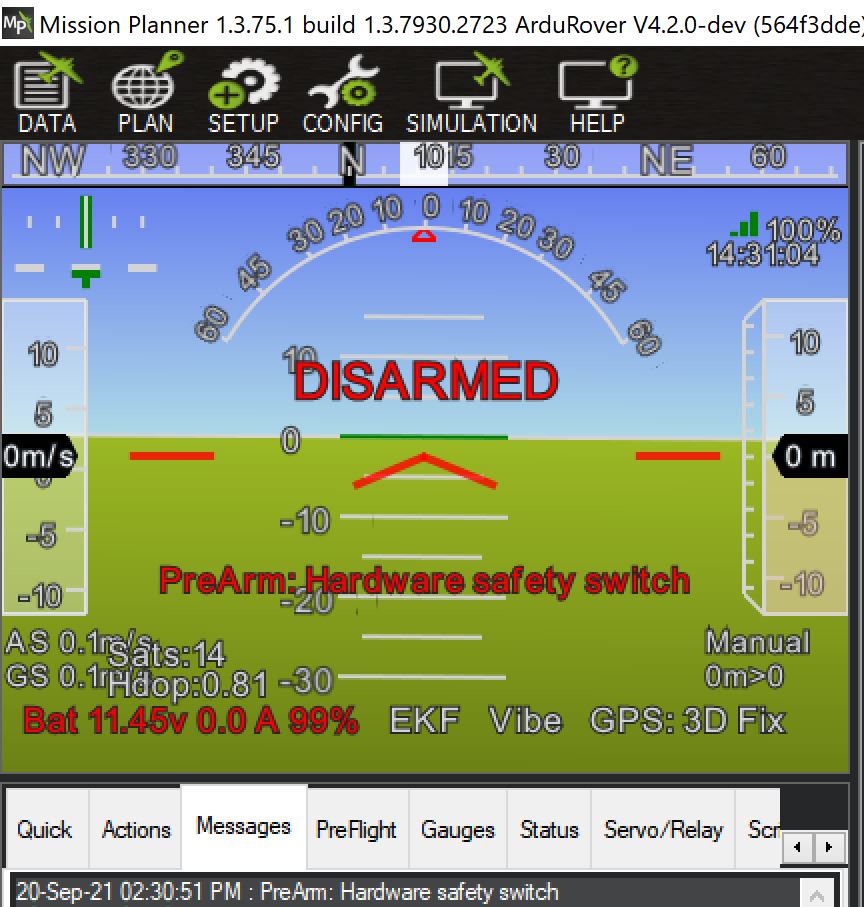
The Mission Planner HUD displays the message: (SAFETY)
I set the BRD_SAFETYENABLE parameter to 0 thinking it would disable the safety switch, as I am not using one.
I should also point out that the car’s ESC has forward and reverse, with forward being from 1500-2000us, and reverse being from 1500-1000us.
Ok, I got it sorted. I thought I had the button disabled, but I had it enabled. Also, I had the arming check disabled, so the rover came up ARMED and I think that messed me up. Furthermore, I had to put the rover into MANUAL mode instead of HOLD mode. These three items conspired to confuse me, but I eventually came around.
The image below shows the (SAFETY) message prior to fixing my parameters.