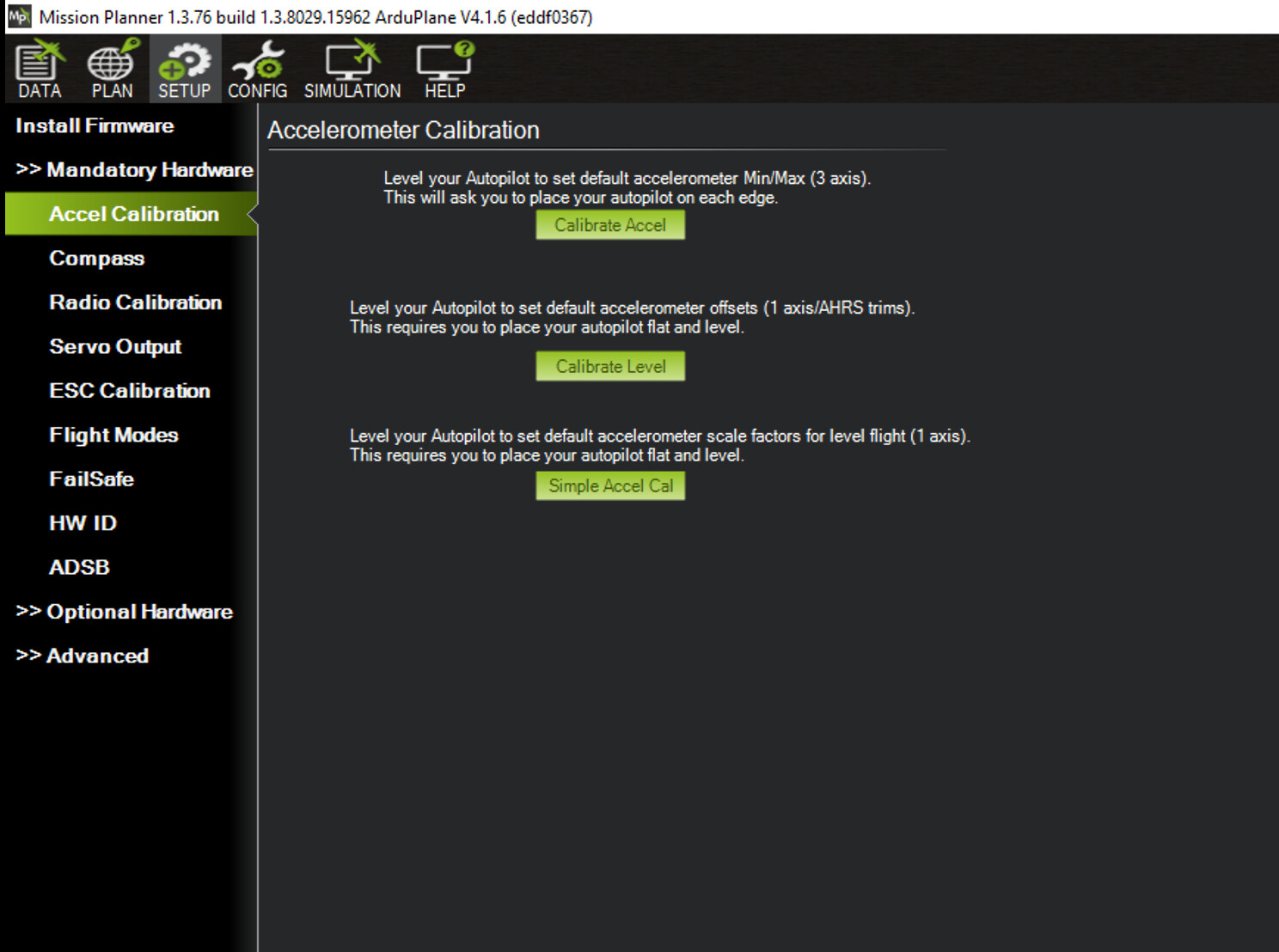
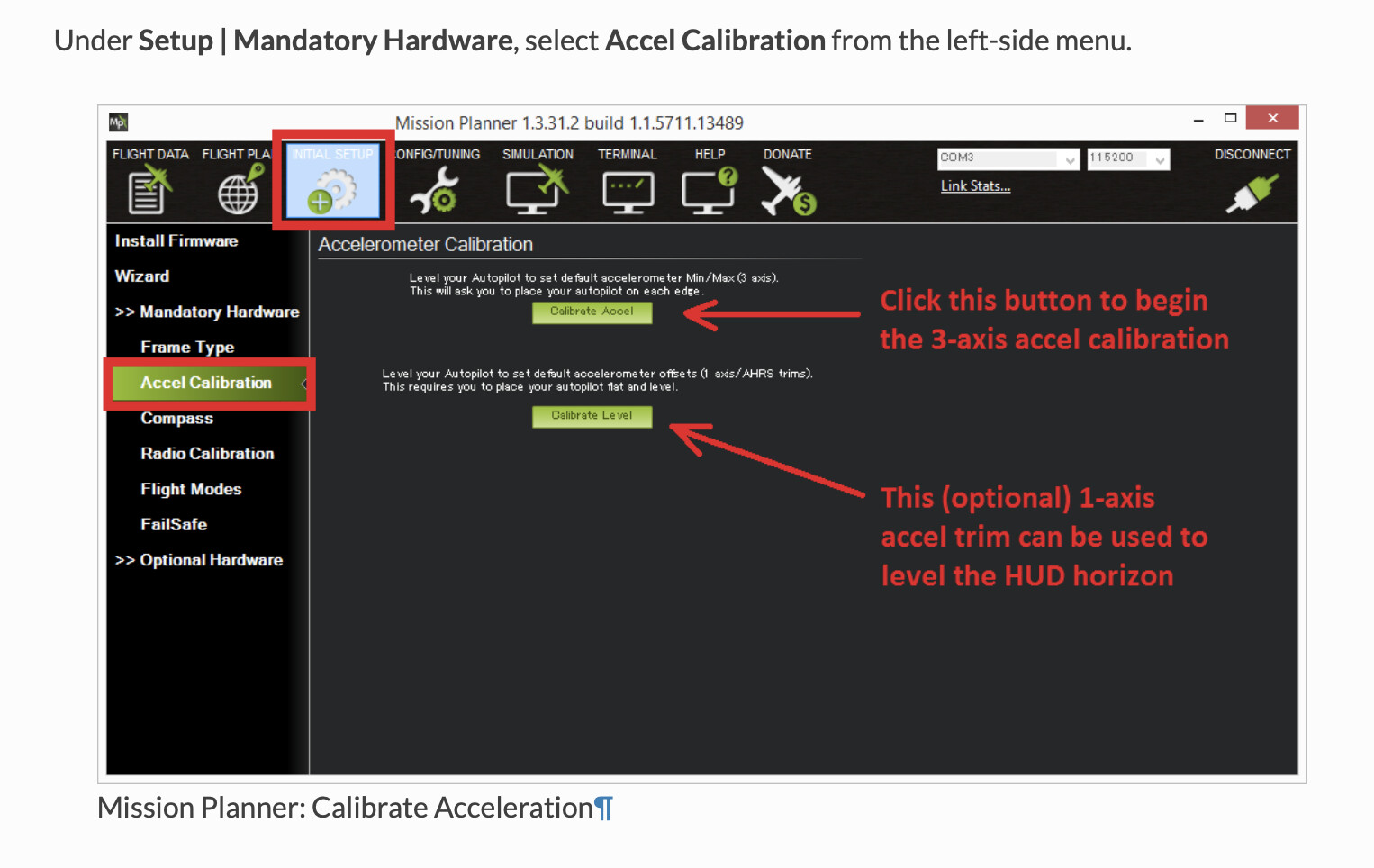
Mission Planner 1.3.76 and ArduPlane 4.1.6, there is now a new option when calibrating the accelerometer. “Simple Accel Cal”. What is this, and how does it differ from Calibrate Level? It seems to be undocumented.
Do I balance the plane on it’s CG, then do the 2nd and 3rd calibrations without moving the plane?
Here is my assumption on it but I’d love to see the answer from one of the devs: The normal calibrate Accel is the most thorough and addresses all axis. The simple calibration is for use with planes or installations where it isn’t practical to flip the thing on its nose or upside down. Swinging a foamy around is one thing, but a 50kg drone is another story. Since the simple calibration only works on 1 axis it’s making assumptions about the rest. If you can do the normal calibration then you’re good to go.
I have tested both of them (OFC devs know it better you should ask for their advice) normal Accel Calibration is really reliable and gives better results. IMO You should calibrate the traditional way
If I do all 3, in order, do you think the results of the 1st one (the full calibration) are wiped out and replaced when I do the 3rd one (simple calibration)? that would be unfortunate!
Yes, the third “simple” one is for use with large vehicles that cannot be easily oriented during the normal calibration procedure. It will overwrite values from any previous “normal” or “simple” calibration.
I wrote that code for the button in Mission Planner. It’s a calibration option that was added to MAVProxy and Mavlink, but had yet to be added to Mission Planner. The code for what is happening in ArduPilot is here. ardupilot/AP_InertialSensor.cpp at master · ArduPilot/ardupilot · GitHub
It assumes that these are newer, higher quality IMUs that have a scale factor very close to 1. So it just calibrates for bias sitting level on the table. Very handy for larger aircraft. The older 3 axis calibration is still a better way to go for foamies. The middle button does this code. ardupilot/AP_InertialSensor.cpp at master · ArduPilot/ardupilot · GitHub which is a not-as-comprehensive calibration.