hi guys im trying to send my hexa on a mission and as soon as it goes in auto mode it seems to drift away other than that it seems to respond well ,ive already calibrated with wizard and all seems to be in order .Any ideas on what to look for ,the log of the last failed mission is attached,i dont have any experience reviewing logs so if anyone can give some hints it would be great.
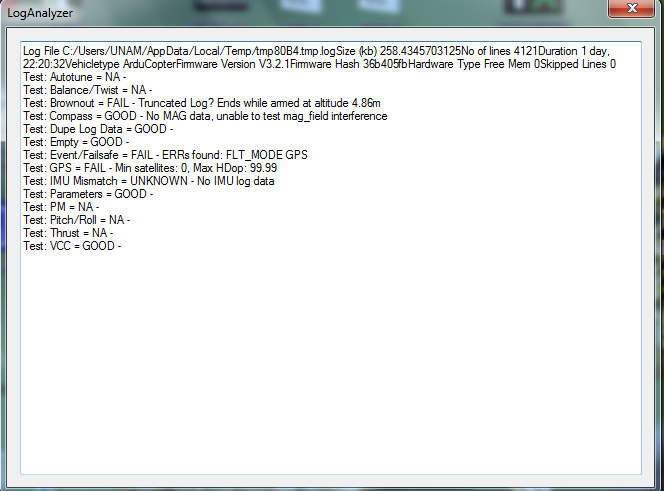
Brownout = FAIL (very bad - power supply not stable)
GPS = FAIL (bad - no GPS = no mission/RTL/Loiter)
IMU Mismatch (bad - IMU controls attitude - but might just be no IMU data in the log)
You’ll need to solve those otherwise success will elude you I’m afraid.
What the WP RADIUS set to and how far are your WP apart. If the WP radius is too large, and WP too close together it will not move thinking hits actual close enough to each to mark it as competed,
Post a actual log, it easier to analyse than reading the auto scrip analyser
The wp are about 50 m from each other and the radius is set to 5,the issues seem to start as soon as the auto mission is trigerred other than that the drone seems to behave normally.
the power supply being not stable i think also comes drom the same failsafe , and the gps fail ,i dont understad hows this happening since before flight it seems to have gps 3d lock