I was doing some testing today with the “point camera here” function in mission planner. It would work fine the first few times, then the simulator would thrown an exception in:
GCS_MAVLINK::convert_COMMAND_LONG_to_COMMAND_INT
It seems that mission planner was sending a command_long with a non-sensical lat/long, I’m pretty confident the values are what you get when you take the int32 values and just shove them into float memory.
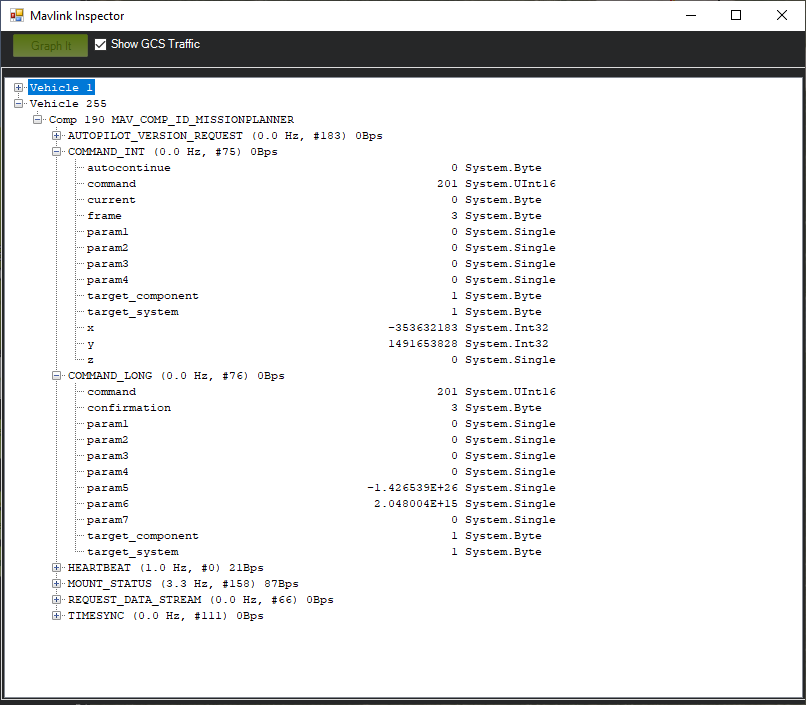
This would cause an arithmetic exception on the line “out.x = in.param5 *1e7;”
I have the traffic from the simulator being forwarded by some other mavlink components. When they are not present, it seems to work without any issue
Not sure why it’s sending command_long when it sends command_int most times.
Either way, this seems like a glitch in mission planner.