Hello, guys! I am new to UAV. I am using mission planner to control UAV for experiment reasons. It is fine to fly with a controller.
The biggest problem I have met so far is that the drone does not execute the imported mission in Auto mode. Here are the details:
- I set a mission, and write waypoints into the drone via Mission Plan(It is the same path when I read the waypoints).
- Then I fly the drone into air at a fixed height in Stabalize mode.
- After I turn the drone into Auto mode via controller, the drone just flies towards a random direction, which is not the imported mission path.
Here are some results:
The purple curve is the actual path. The first half of a path is how it flies automatically, and the second half is the path I fly with controller in Alt_hold mode when the drone is going to fly out of the playground.
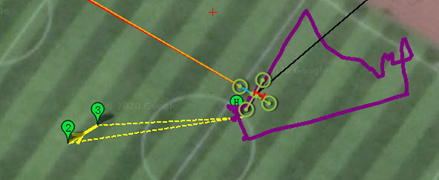
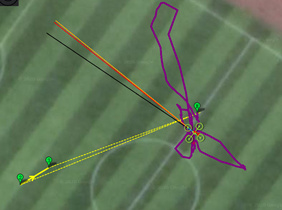
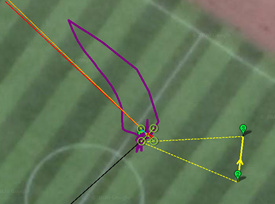
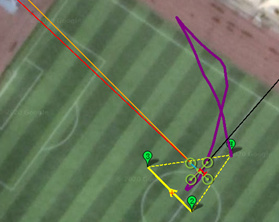

And the most strange result is that even if I only upload a mission that tells the drone to fly and hover, the drone still flies straight towards a random direction

In the official files, it says the drone will automatically carry out the imported mission. What is going wrong? Can somebody help me solve the problem, please? I can upload the logs if it is needed.