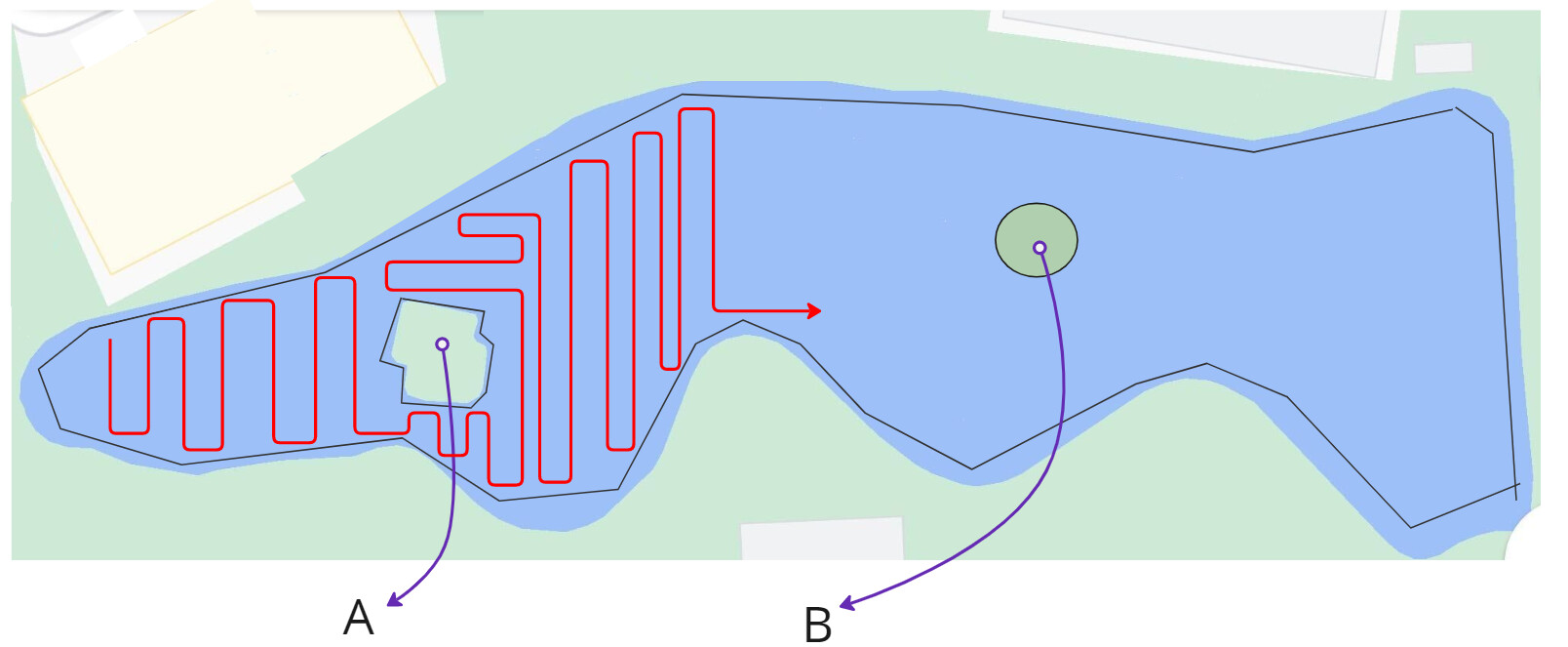
I plan on deploying a rover boat to survey a lake that has fountain at it’s centre. I wanted the mission that is planned by the system to automatically plan the path around the exclusion fences that is preloaded. what option/ steps should I take to do the same?
Simplest solution is to plan the mission as if the obstacles were not there and then manually move any legs that conflict.
Next simplest is to enable obstacle avoidance for fences and just make sure no waypoints fall inside the fences. That gets a little tricky, since obstacle avoidance requires some test/tune before trusting it implicitly to avoid immovable, expensive objects.
I looked into modifying the survey planner to do exactly what you want when I made the PR to include opposite direction spiral paths, but it is quite geometrically complex, and, while probably not beyond my capability, it exceeds my patience level to implement.