I do have the same problem.
WPNAV_SPEED is set to 8 m/s.
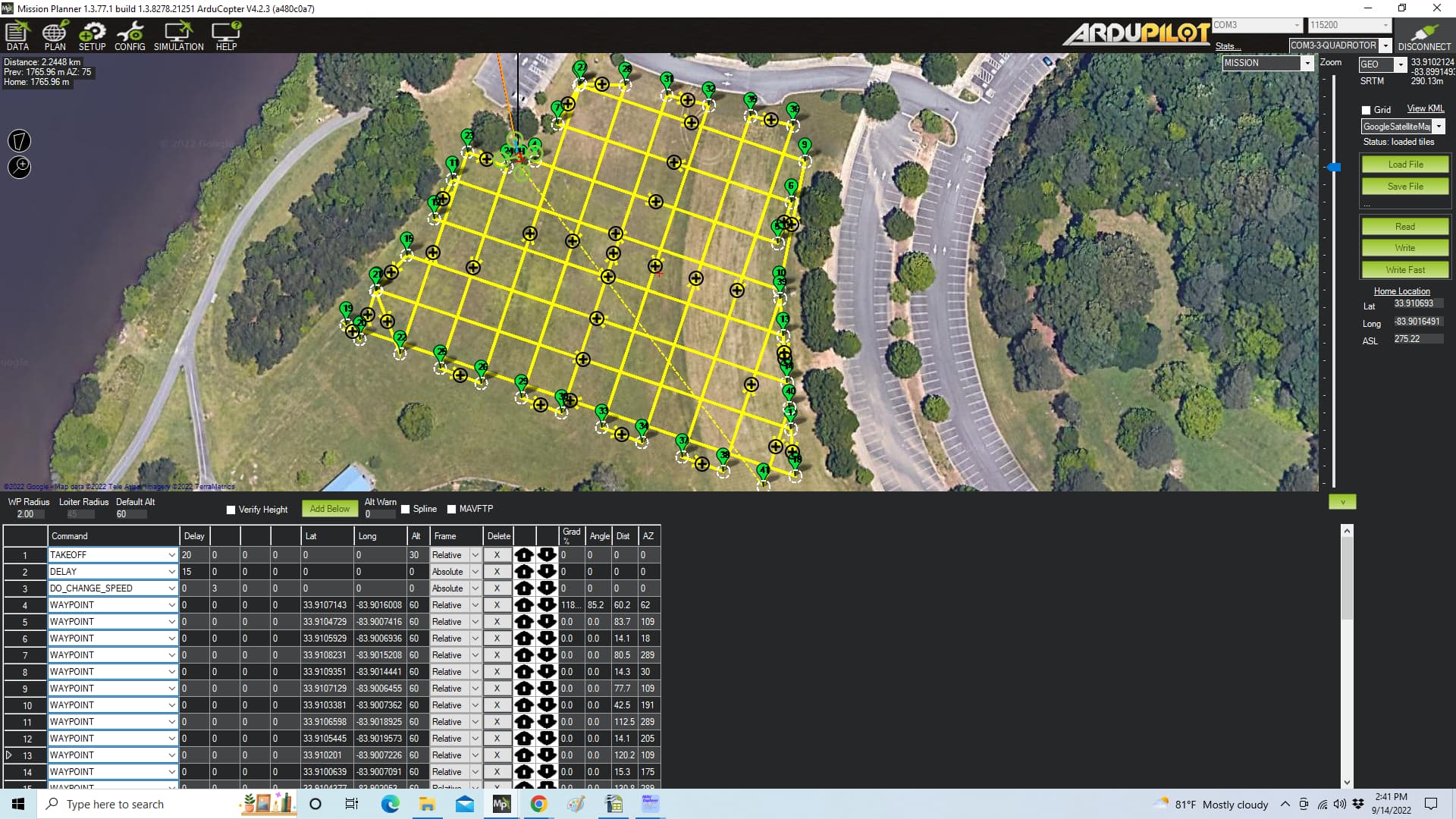
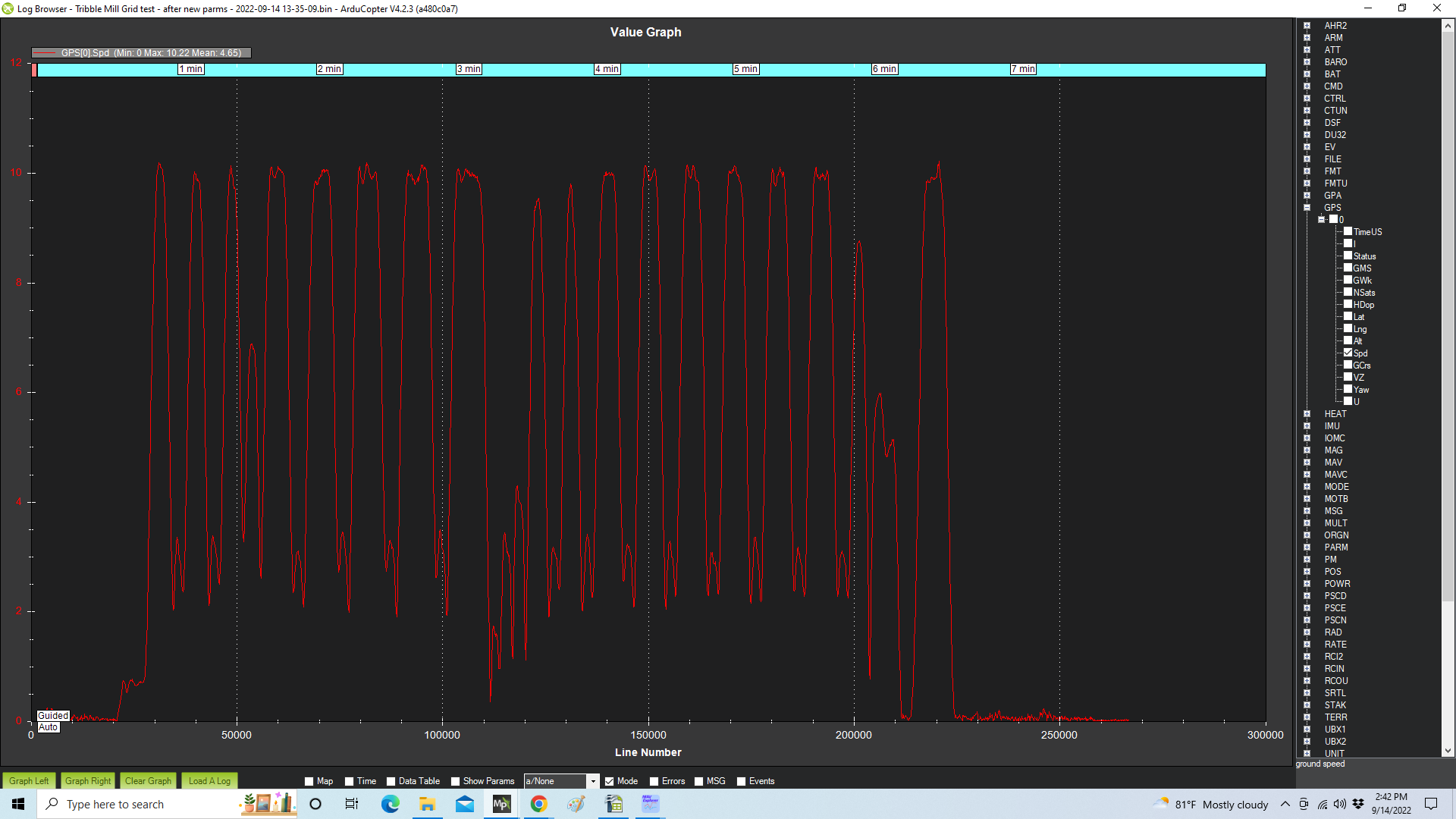
In the misison I command 5 m/s with DO_CHANGE_SPEED, yet the drone continues to fly with 8 m/s after the command.
I’ve just been playing with this in the simulator and I’ve noticed the same thing. DO_CHANGE_SPEED in a mission was ignored and the quad flew at WPNAV_SPEED.
Thanks very much for testing. I’ve added this to our 4.3 issues list and we will investigate.
EDIT: ah, wait. This is a known issue. If you move the DO_CHANGE_SPEED command to be immediately after a waypoint then it will work. I think we can get this fixed before the final release.
Regarding the Known Issue - it states that DO_CHANGE_SPEED fails if immediately after TAKEOFF. In my test flight, there was a DELAY command after TAKEOFF. So for clarification, it does not appear that DO_CHANGE_SPEED not being “immediately” after TAKEOFF is a precise description of the problem.
I just realized that I posted this in the wrong section. I’m using the latest stable version of copter - not the new beta release. So the issue pre-dates the beta. Sorry for the confusion.
Was this issue ever resolved? I didn’t have the issue in earlier versions of ArduCopter, but have it with ArduCopter V4.2.3.
I also had an issue with ArduCopter V4.2.3. where I flew second mission of the same area and it was offset from the first mission by about 80 meters west.
I will try to determine the earlier version that didn’t have the issue and reinstall it.