Hi all,
I was curious if anyone has any experience with how much the waypoint radius of DO_DIGICAM_CONTROL commands can be reduced but still achieve reliable navigation when using a Pixhawk. We are attempting to conduct some extremely high overlap missions (90%) at lower altitudes (40 m) and I think we’d give our Pixhawk a headache if we tried to upload a mission that looks like the following
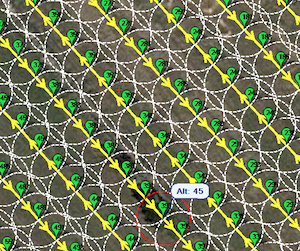
We’ve had some issues with photos not being captured when even a pair of waypoints are too close, so I wouldn’t expect much from the survey above. The photo capture frequency is <1 s in this case, which led us to exploring the use of an intervalometer, but unfortunately this method would not yield any CAM messages for geotagging.
I’d appreciate any feedback on an appropriate waypoint radius size. We are flying a hexacopter at relatively modest speeds of 5-10 m/s.
Cheers,
Adam