I need to set a minimum PWM for the motor that it will not go below after take off. Is there a way to do that?
Obviously during arming and taking off PWM will need to be lower than that. But once air borne I cannot have throttle PWM go below a certain value, or else the copter becomes unstable, has poor response to the flaps, and crushes.
Another words - I need to be able to set a minimum PWM for descending, that is just below hoover PWM, both in auto and manual modes.
For starters, I think I could live with being able to set MIN motor PWM for all modes and phases of flight, All I need is a motor PWM not drop below that value.
The problem I see is that the ESC will not arm if PWM5 MIN is set too high,
I have a vague memory of that in the AltHold section, but I’m not sure. I would advise against using such a thing for manual control though, if you set it too high you could send your copter to space with no way to bring it down (safely).
Such small error can happen very fast, you remove a camera or change the battery, forget about the setting, and your copter goes to heaven.
If this features does not exist and the devs want to implement it (it’s quite usefull for the single/coax), we would need some safety to bring the copter back down.
I agree. This may result in a potentially risky situation. Didn’t think about it.
But what would be the remedy?
You know this situation real well yourself from you own work. I have finally ended up with a single copter that’s ultra light and efficient. It has a chance of staying in the air for 20+ minutes. The copter uses 12" prop that spins quite slowly so the air flow over flaps is low.
Its is very controllable at hoover, but the moment the motor PWM drops 100 below hoover PWM the flaps lose their authority, will not recover even if throttle is increased, and it crashes. For the flaps to be effective at 100 PWM below hoover they would have to be gigantic. I tried that but it is not feasible. Adds too much bottom weight and size.
I thought that limiting motor rpm would be the solution but I must agree with you - it may create a potential fly away hazard.
Dave just advised about the MOT_SPIN_MIN parameter that would need to be set just below hoover.
If not MOT_SPIN_MIN, what other parameters could I use for all the modes?
Would PILOT_SPEED_DN be the parameter?
If so, will it work in ALT_Hold, Loiter and Stabilize? It must also work in RTL and Land modes.
There is a PILOT_ACCEL_Z parameter. Does it work in both directions and in all modes? I however would not want to limit speed and accel in the up direction.
For the final stage of RTL I think I can rely on LAND_SPEED and LAND_SPEED_HIGH but that will not work during normal flight.
I think MOT_SPIN_MIN is your only option and you will have to be careful for the reasons mentioned if it’s too high (it won’t come down ) . I would be interested to see a Flight Log, it’s not everyday we see a fairly successful Single Copter. Most are like the Balance Bots of Rover; sounds cool but in execution not so much.
Sure, I’ll poste a log. I can even post a log from previous crashes.
Single copter with a small 5-6" propeller is not a problem. They fly really nicely and stable because they make a lot of air flow over the flaps. What’s challenging is landing and sometimes take-off.
At take off and landing the flaps have the opposite effect to that after airborne because at least one of the legs is “anchored” to the ground and so the copter cannot move the tail for balancing.
Because the copter is virtually weightless at that moment, and with high center of gravity, the force from the flaps make the copter fall sideway. Best would be to disable flaps until the copter is a few centimeters above the ground, that is until it is free to move the tail for balancing.
The same at landing. Automatically disable them just before touch down. What I do - I kill the motor if I remember.
During take-off, you must take-off quite fast to let the flaps do the job.
This is a serious problem. One should be able to take-off and land slow and gently. Especially with a large single copter.
Another problem is having any side ways speed vector during landing. Because of the high center of gravity, any side speed makes the copter fall over. There is always some wind, so manual slow landing practically always ends up with a fall. This is why I practically always land in auto mode (Land or RTL).
These modes make the copter land perfectly vertically even in windy conditions. Optical flow sensor here works really well.
It’s just like landing a helicopter - no sideway speed allowed.
Unfortunately these small single copters don’t stay in air for too long. In my case just about 2 minutes.
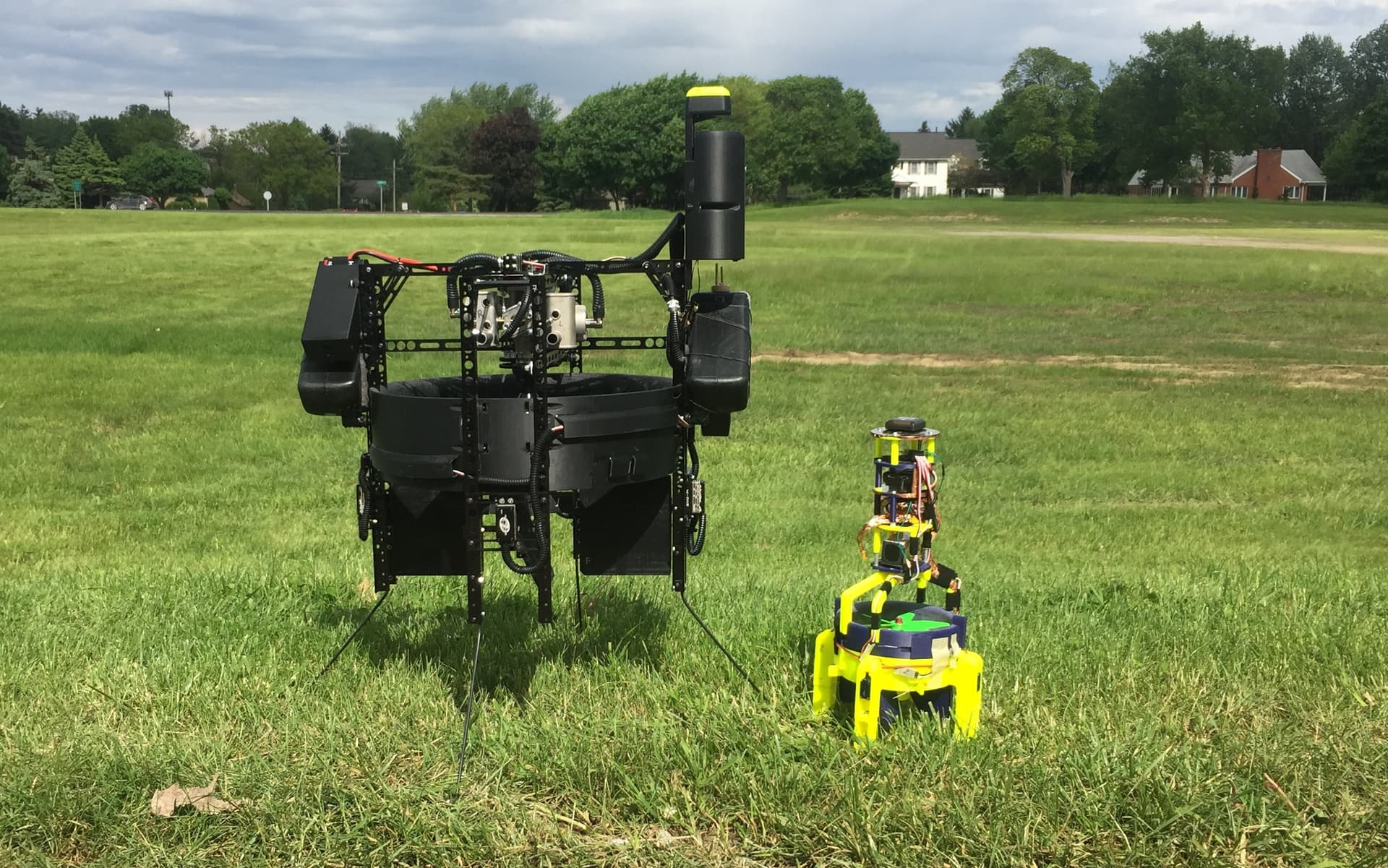
This is why I built this next ultra light and larger version. Same weight but prop is twice the diameter. The power draw is a quarter of a small copter. It hovers at a very low throttle. I just did not expect that even large flaps would quickly lose their authority at throttle level just below hover. You make it descent too fast and it goes into resonance and crashes.
I tested many different styles of flaps (on a test rig). The conclusion is always the same: they need to be unreasonably large to work well at very low throttle settings.
An alternative is to use a very heavy battery on top of the copter, which kind of defeats the purpose.
In my opinion single copters are fine, except for landing them safely. They are really fun.
Yeah, I had exactly the same problem at take-off and landing. Full throttle taking off and none touching down adds a bit of spice to the piloting lol (hadn’t time to set up auto mode properly on mine so I only did that).
I would absolutely love to see videos (and logs) with your explanations and frequent updates (I sadly can’t have fun with building one for the next few years so…). Maybe it could even inspire more people to build a single copter on this community
To solve the touch-down / take-off issue, the only thing I see is having the flaps above the center of mass. But you’ll have to start a brand new single-copter design to achieve that (could be much better than what we are used to, idk).
For the flaps authority, it really seems like you’ve reached the limit. I don’t know what your design looks like exactly but here are two ideas:
ducting the flow
grid design (so basically, having more than 4 flaps)
I would love to see a grid design, I think it could have some insane performances to weight, especially on big single-copters. But it’ll be a pain to create.
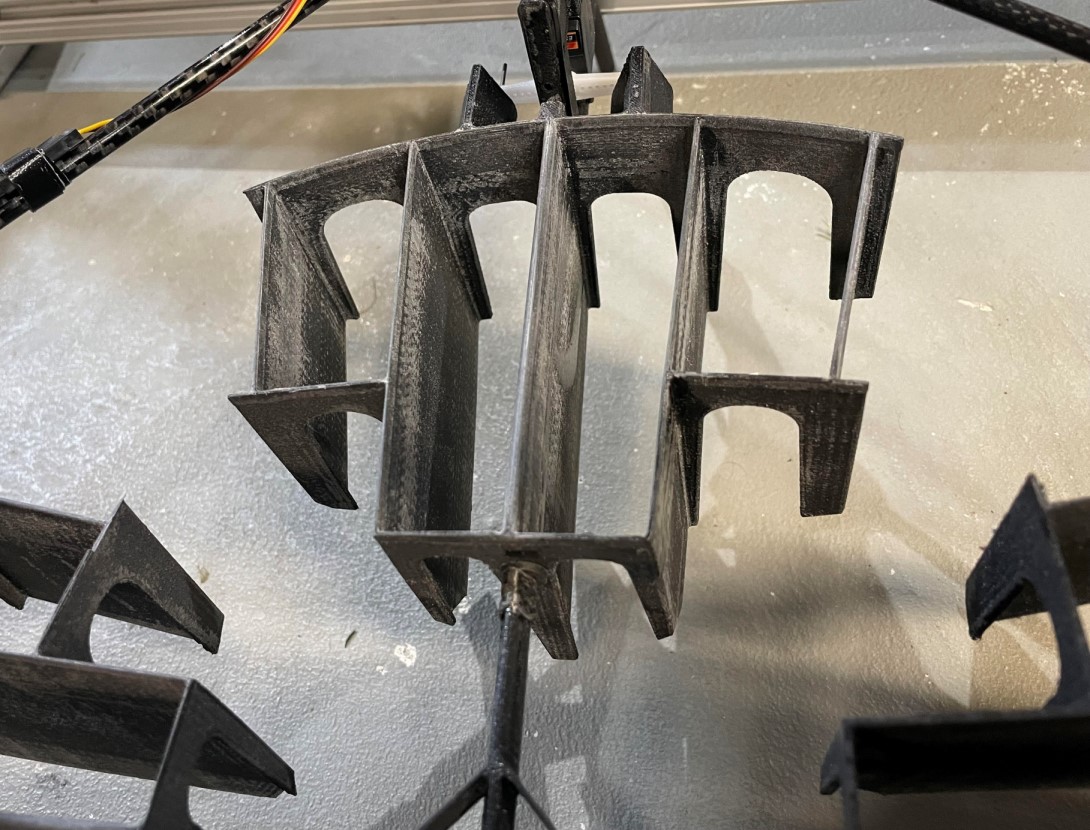
I use a variety of grid fins interchangeably with planar fins. I try not to as I find they generate more drag, and consequently reduce flight time. They are heavier too. In my tests I see that they generate only about 30% more torque than the lighter and longer planar fins. Attached is a picture of a fin that I will use in my next copter.
Shrouded propeller is a bit more efficient, but I find that the extra weight is not worth it. I started with shrouded, but now I also use open propellers.
I did experiment with flaps on top, also flaps on top and at the bottom. The problem is that the top flaps must still be placed below the propeller. That means that the motor and servos are placed very high. This forces the top flaps to have to swing a lot of mass. In my case they take-off nicely, hover for a moment, but get into resonance and crash. The top flaps are not able to cope with the large inertia at the top.
In case of top and bottom flaps, the bottom flaps can’t cope with the low center of gravity (because of the centrally placed battery) and low air flow (being so far down from the prop).
I had better luck replacing flaps with 4 small motors and propellers on top of the copter, with propeller shafts horizontal. You can use bi-directional motors or variable pitch props. That however was a lot of added mass that created no lift, just side forces. The frames flew quite well. They would cope with lending while having some lateral speed but the power draw was huge. Because of that the flight time was only about 1 minute.
My specialty is internal combustion engines, so my primary goal always was to develop larger, gas powered drones. For gasoline engines I find single copter to be the most logical type of frame. The electric copters I build are only stepping stones as they are a million times simpler to work with, and cost less after I crush them. Unfortunately, I am not a pro in using Arducopter software, so I really struggle with it. There are hundreds of useful commands and settings that would make it all work well, but I don’t even know about their existence. I only learn about them when I crush and look for solutions. It takes me almost a year to rebuild a gas powered copter, so it is no fun. That’s why any help I get on this forum is priceless for me.
I can see several ways of improving take-offs and landings but they can only be implemented in larger gasoline drones than those I’m working on at the moment.
Cheers!
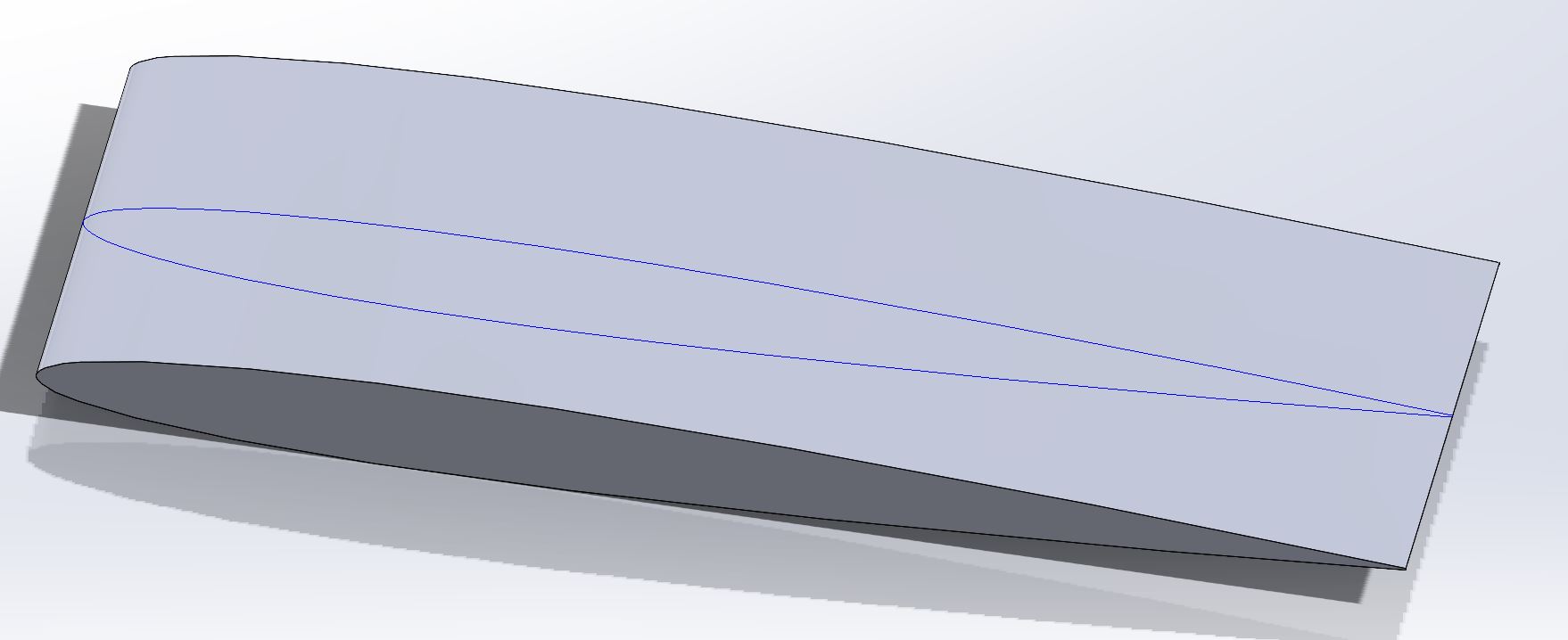
About the shape of the flaps, I can’t see them well, but you should try an airfoil design instead of a plate. It will help a bit with flaps authority and flaps drag. I used this website for mine NACA 4 digit airfoil generator (NACA 0015 AIRFOIL) then struggled to import it in 3D.
That’s a very nice grid you got there, and it’s very true that it will create drag hadn’t thought of that. Have you ever considered having each flaps of the grid with its own rotation axis, instead of all being in one part?
The thing with grids is that they take a lot of space if made in one piece. I think a first copter with 2-3 (time 4) flaps, each on its own axis would be possible. Those would be closer to the prop pushing the airflow inside easily generating more torque and less drag. (lots of work though, and much easier to craft on a big copter)
The work does not matter if it does not fly well. Still a lot to work on landing of those things. I think it is you Hubble who did some insane work - you did it so quickly, and you made it flyable almost right away. I was impressed.
Thank you for the website with profiles. Great help.
I agree that the flaps should have an airfoil profile. I like the one you used in your copter. I did use airfoil for some of my single flaps, but they were much flatter profiles than yours. In fact I was in a process of switching to your profile.
In my grid flaps the center flap has an airfoil to it. A shallow airfoil though. The side plates are flat with rounded leading edges. I wanted to avoid air compression between adjacent airfoils. I remembered from fluid dynamics classes that plates placed too close to each other, at certain air speeds generate drag almost as large as a plank of the width that equals the distance between those plates. If they have an airfoil shape the compression may stop airflow between them at lower speeds yet. Not sure at what speed though so wanted to play it safe.
100% agree on using multiple flaps with individual axis. I was putting it off for the future for larger single-copters because as you pointed out they complicate the design. Linking them with each other is not simple. Alternatively each could have it’s own servo, but that’s a lot of extra weight at the bottom.
Some explanations:
All done in Loiter with Land at the end.
PIDs: P=0.40 , I=0.35 , D=0.02.
MOT_PWM_MAX = 1630
MOT_PWM_MIN = 1300
There was practically no wind (below 3m/s). It never flew higher than 3 m.
The battery was placed really high to give more authority to the flaps.
I was as gentle on the throttle as I only could, holding throttle position when I noticed the prop started to move before take-off. You will see from the graph that the copter jumped into the air about 1.5m. In does that on every take-off. It takes-off to fast. Why?
It’s kind of good for this craft, but how can I control it? What parameter should I use if I want to slow it down?
With the right stick centered, the copter was making about 3 m circles – would not hover over one point. I had to continuously gently correct it.
Eventually it became unstable, looked like it was about to crash so I turned into Land mode. It shot up instantly about 1m higher (why?), and then it went down almost like a rock. It was not the present 30 cm/sec. The speed of landing was totally unacceptable.
I’m glad it went down from less than 3m so it is still in one piece. The log though shows that the altitude was much more, but that is not true.
Please have a look at the log and see if you can tell anything from it. I see that the flaps did not reach their limits, so getting into resonance is hard for me to explain.
Previous flights with lower PIDs were worse.
Next time I’ll try to film it.
Hey Max, I don’t have time either. Whatever time I have I spend on hardware. No time left for learning Arducopter software. This is why I struggle with it so much.
Then I crush my copter and back to fixing it and working on hardware. I wish there was an Ardupilot Academy on Youtube.
I saw the video of your Tandem copter controlled by flaps. I made a similar one a while back. Great mind think alike
Below a picture and a link to a video. I kind a like it.
Whatever I do however with electric models is a stepping stone to “real” gasoline powered drones.
I fly all my copters in Loiter and auto modes. I’d never be able to fly them in Stable. Too hard for me.
A funny vehicle indeed! My BC series is rather about standard bicopters, but with servos. This one is a trickier machine. What firmware was that?
For a Coax (with same-oriented servos doing the same job), the usual way of yawing by differential thrust does not work well here, since it will also do roll. Hence it should be rather controlled by pitch flaps, as Bicopter does, but what do the roll flaps do in this case?s
This is two single copters. No thrust vectoring. 3 flaps under each (total 6). You should see them.
Pixhawk Mini with Arducopter software for a single copter. I just hard Y split and doubled the outputs.
I wish I had more freedom with Arducopter. Somethink like… developers frame with separate access to signals before they are superimposed over each other, and have ability to manipulate them and mix them any which way I want to. Unfortunately in a single copter torque countering is superimposed over pitch and roll. This really limits me a lot in experimenting with different configurations.
Coax is not an option for me as it it to hard to make a coax gasoline version.