From the terminal window try this way:
magfit_WMM.exe --el --reduce 10 <path and logfile>
From the terminal window try this way:
magfit_WMM.exe --el --reduce 10 <path and logfile>
OK thanks. It’ll have to be tomorrow now.
My mistake. I returned to my laptop today and realised that the log that I was trying to analyse yesterday was only 1-minute long, which means it was a test flight I made in one orientation only just to check the vibe data.
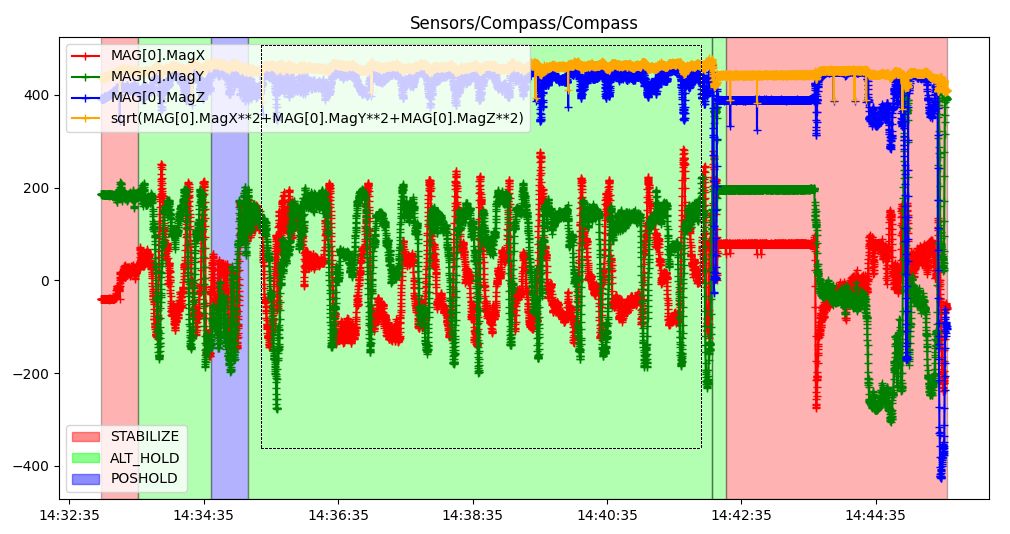
Today I selected most of the AltHld part of the log from a flight I made with many deliberate 360 degree turns:-
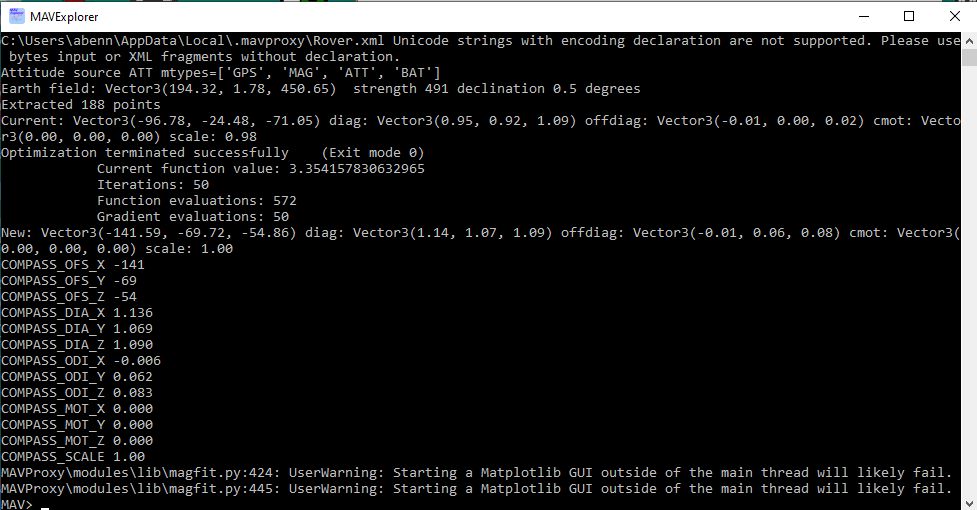
Running MagFix on this graph worked correctly and gave me what look like sensible parameters to load into my hexcopter:
My only question now is, why did it not work on the shorter log file? Was it because it couldn’t find any change of orientation during the flight?
I don’t know. I’m curious if someone who understands the code could say, but there’s probably something to it. Especially if it worked for you on a full test flight. Glad to hear you got it working.
I’ve successfully run MagFit on three helis and one hexacopter now. For one of my helis though (TRex 550 with scale fuselage) MagFit generated a number for COMPASS_OFS_Z which is greater than what MP thinks should be normal – 409 compared with MP’s normal range up to 400. MP allowed me to input and save it as 409, but I’m wondering if that means my compass was badly calibrated in the first place even though the heli was PosHld-ing without any toilet-bowling or drifting.
I hate to ‘fix’ things that are working, but should I re-calibrate my compass, and then fly and do MagFit again? Or is the large number simply something to do with the location of the compass in the heli?