Hello!
Just to be clear, the min_TOW and max_TOW are expressed in kilograms or grams?
Thanks
Hello!
Just to be clear, the min_TOW and max_TOW are expressed in kilograms or grams?
Thanks
Are you talking about the Input Shaping Parameter modification?
Either, so long as you are consistent.
You could use pounds, kilograms, adult badgers…
The maths will work exactly the same and give the same result for this type of calculation:
new ATC_ACCEL_P_MAX = ATC_ACCEL_P_MAX x (min_TOW / max_TOW)
https://www.theregister.com/Design/page/reg-standards-converter.html
The Reg online standards converter is compiled from units people have actually used in real articles!
thanks, you are right, I did the math and of course is the same result… I was very dumb…
Any way, we have made this 21KG hexacopter, to carry on a a 6kg sensor.
it has:
6 x T-Motor P80III 120KV, Aplha ESC integrated (12S)
6 x MF 3016 Props
4 x 6S 30000mah Liion batteries
Drone weight: 11Kg
Drone with 2 batteries (12S 30000mah): 16.2KG
Drone with 4 batteries (12S 60000mah): 21.5KG
Drone with max payload: 28Kg.
I have made autotuning several times, the results are very similar, but the drone keep having a no reliable behavior I dont understand is its over tuning or undertuning. This never have happened to me before, but its true this is our first heavy payload drone.
Here its a video of the last flight and the log., if anyone can give me a hand to understand what its going on will be great. In this log I was trying to go up and down the P and D from roll and pitch looking for a good result.

With soft movements, drone seems to be ok, but if I do a hard roll or pitch, the drone start swinging arround in Loiter. In that moment I change to AltHold and the drone stops and recover.
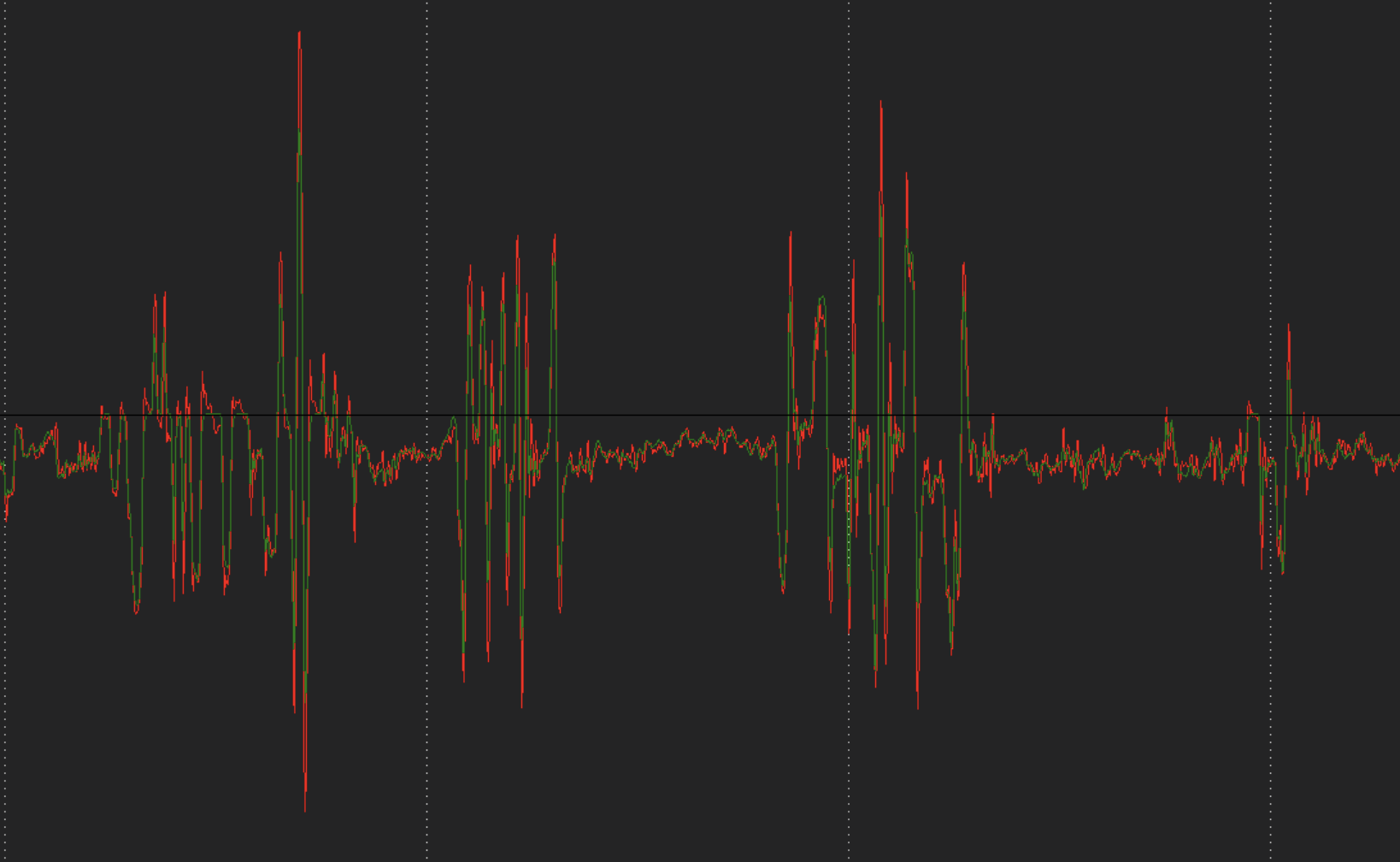
This is a roll and roll desire from the logs
Thanks!!
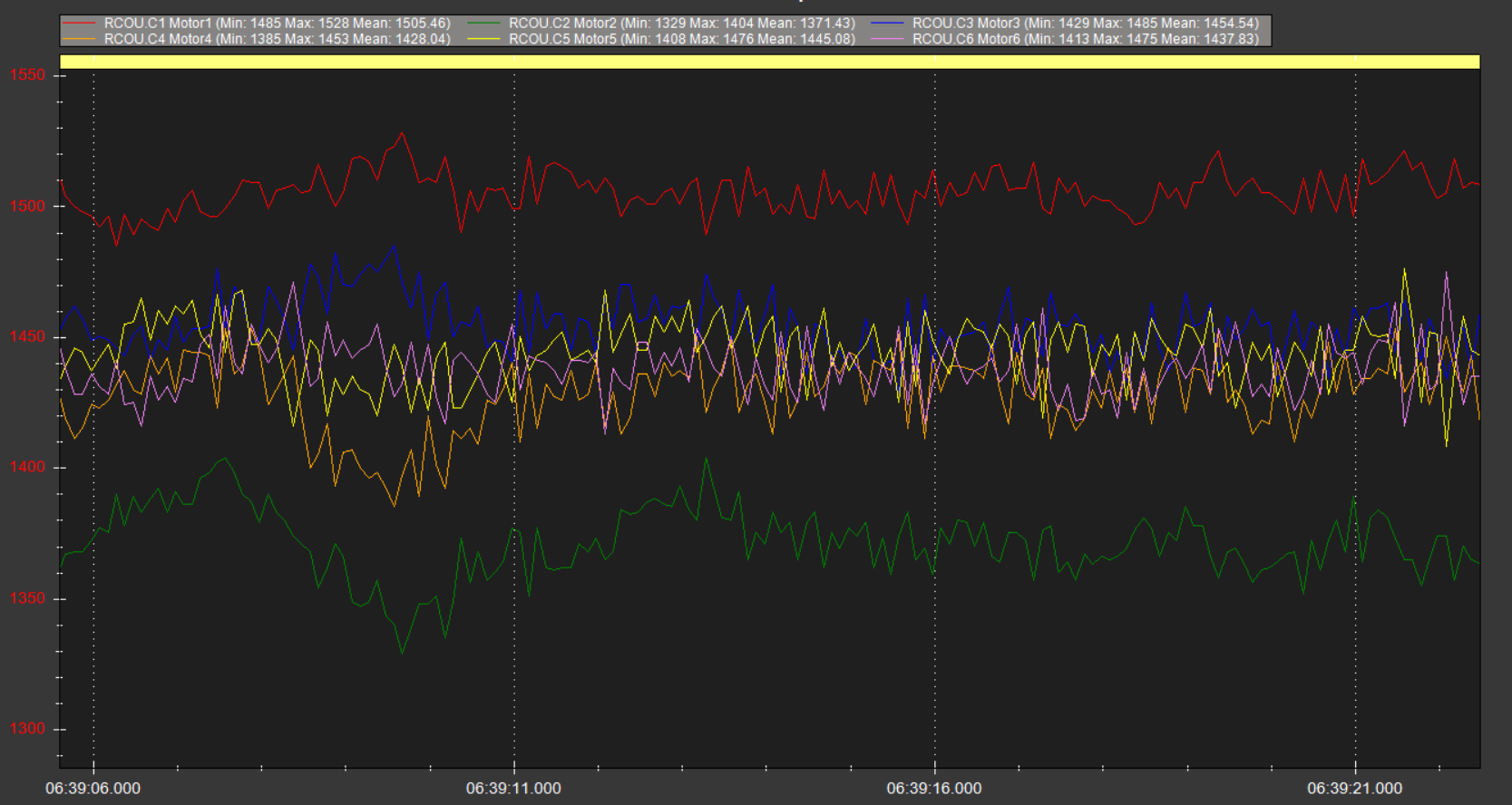
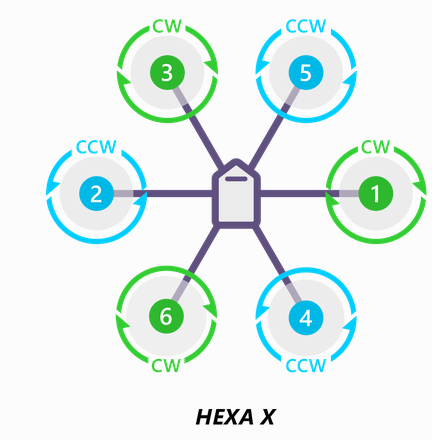
You have a problem with quite a significant centre of gravity shift, heavier towards Motor 1 and it has to work a lot harder than the rest.
Z axis vibrations are also getting close to be an issue - see if there is anything you can do to reduce vibrations.
After fixing those, set these and do another test flight - hovering and some gentle movements, AltHold and Loiter.
ATC_RAT_YAW_I,0.08
ATC_RAT_YAW_P,0.8
GPS_GNSS_MODE,65
INS_ACCEL_FILTER,10
INS_HNTCH_ENABLE,1 // write this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_BW,10
INS_HNTCH_FREQ,30
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_HMNCS,3
INS_HNTCH_REF,0.13
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
LOG_BITMASK,180222
PILOT_THR_BHV,7 // spring centred throttle
Thanks, I will try it
What do you think about the bouncing on the braking? Did you saw the video? I saw the unbalance in the Logs, but I think can be the batteries that wasn’t very good installed, as I was using just 2 and not the 4 , but as the drone is very light yet, despite of the unbalance, I think the drone should manage it, it has a lot of power, 18KG per motor., and the drone was just 16KG in that flight in the video
Thanks
Hello!
Ok, I have restore the cube configuration, to avoid any miss configuration, start from scratch.
I think vibrations are better and weight distribution too, today I have used 4 batteries, 21KG drone.
The result is almost the same, here is the video and the telemetry with the change you have asked me, you can see in the video I almost lose the drone with a gentle pitch movement.

Can this be related to the 4.4.1 release?
Thanks!
No, do not try to find software bugs where there are none.
Reduce vibration levels and do a proper tune. Gives you much, much better results than a conspiracy theory about non existent firmware bugs.
thanks, Im sorry about the version SW comment, I know you work very hard to give us the new releases, it was just a question, dont get angry ![]() , but I already flew the drone with 4.3.7 a month ago and wasnt this bad, that is why I made that comment. Today I went back to 4.3.7 and restore previews params, hope that can work.
, but I already flew the drone with 4.3.7 a month ago and wasnt this bad, that is why I made that comment. Today I went back to 4.3.7 and restore previews params, hope that can work.
hello Shawn, the log I sent has not the data, this is the right one
thanks
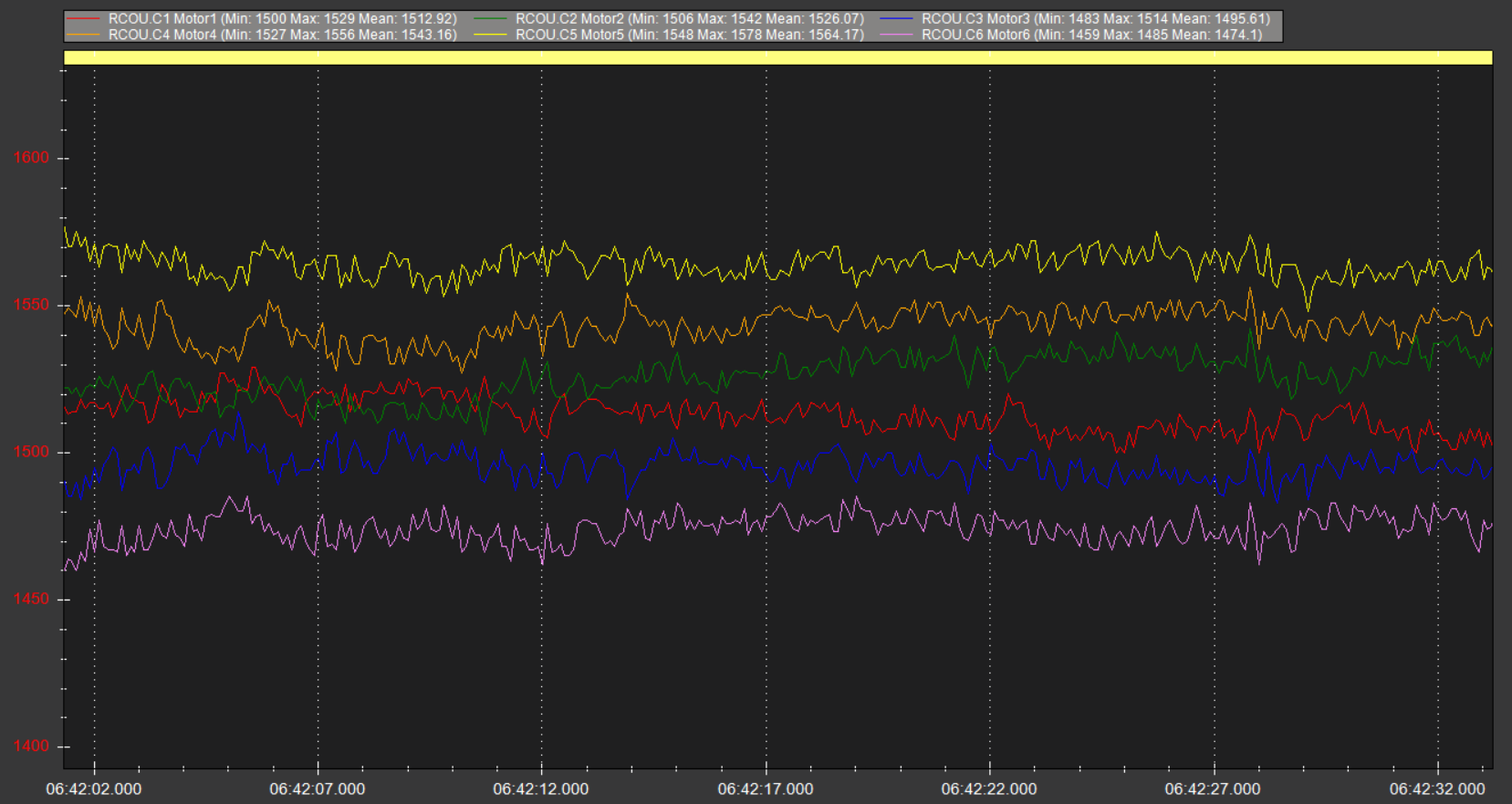
There is still quite a difference between motor outputs
That’s not the end of the world, but it is definitely easier to get a good tune when all the motors are working equally.
I would adjust these:
ATC_ACCEL_P_MAX,20000
ATC_ACCEL_R_MAX,20000
ATC_ACCEL_Y_MAX,9000
INS_ACCEL_FILTER,10
INS_HNTCH_FREQ,32
INS_HNTCH_HMNCS,11
INS_HNTCH_REF,0.22
and I didnt notice this earlier: Alpha ESCs !
You will need to change
MOT_PWM_MIN,1100
MOT_PWM_MAX,1940
and recheck your MOT_SPIN_ARM and MOT_SPIN_MIN using MissionPlanner motor test.
This will alter your hover thrust value in the next flight, so you have to readjust:
INS_HNTCH_REF = 0.7 x hover thrust value (approx)
PSC_ACCZ_I = 2 x hover thrust value
PSC_ACCZ_P = 1 x hover thrust value
Thanks, I already have this
MOT_PWM_MIN,1100
MOT_PWM_MAX,1940
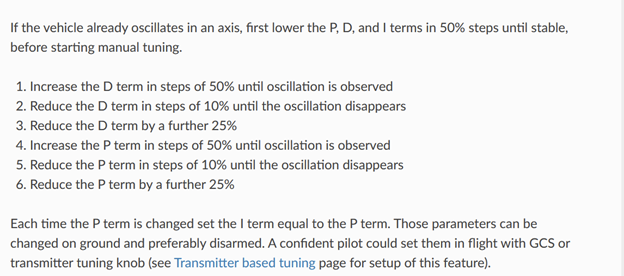
What do you think about adjust the D on pitch and roll? As this document say, my problem is oscillation.
So, today I was doing some manual PID, and now drone works pretty much better. Im a little confused because AutoTune give me number too small, now im almots in P 0.2 with pitch and roll, a D of 0.002, very far away from autotune.
here is the log
Let me know your toughs pls
thanks!
here is the last log.