Hey there,
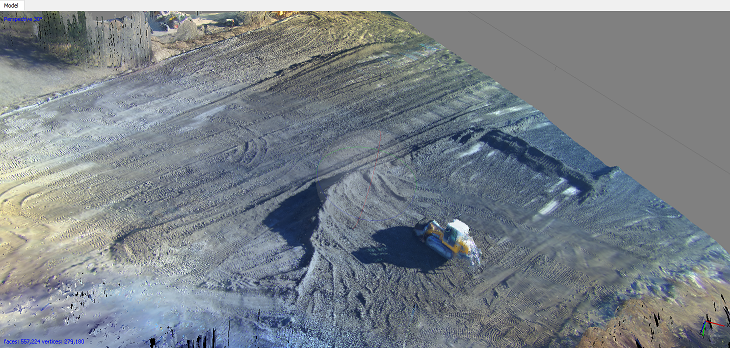
i was formerly an active drone surveyor. As regulations started to hinder the use of self build drones (3-6 months certification duration and now all registration on hold) and close or within cities you need a single approval for each job, i started to build a small light mapping drone for basic mapping of roofs and small areas ~50.000-100.000 m². There is no permission needed for “drones” <250gramms. Constraints for the build was 3D printed design, for fast repair and replication in small quantities. I post this here to answer questions for ppl willing to copy and use the design.
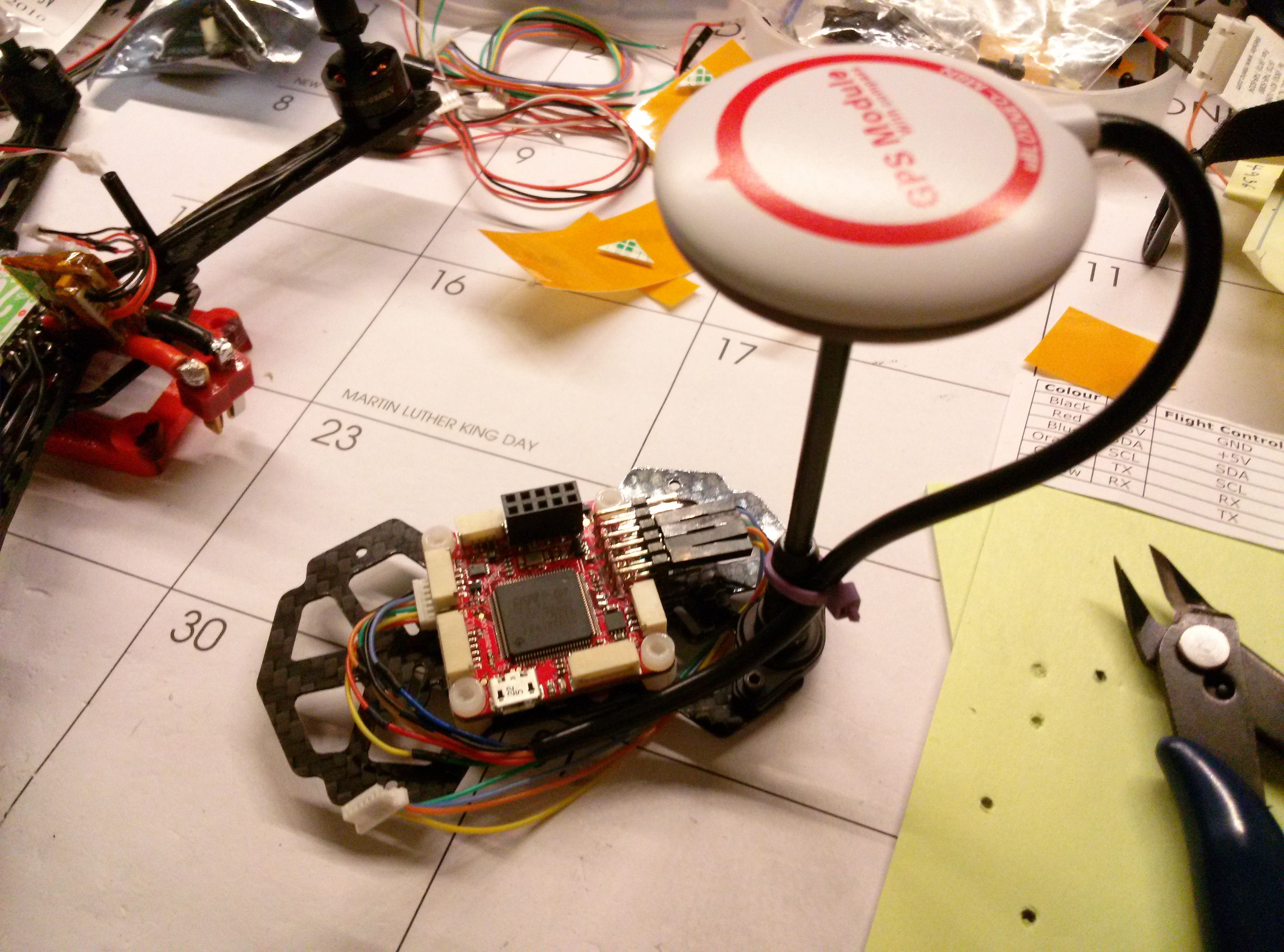
The design was printed on a prusa i3 printer (diy) and i did a couple of scans already, but i’m still in developing state and open for suggestions to shed some weight.
BOM:
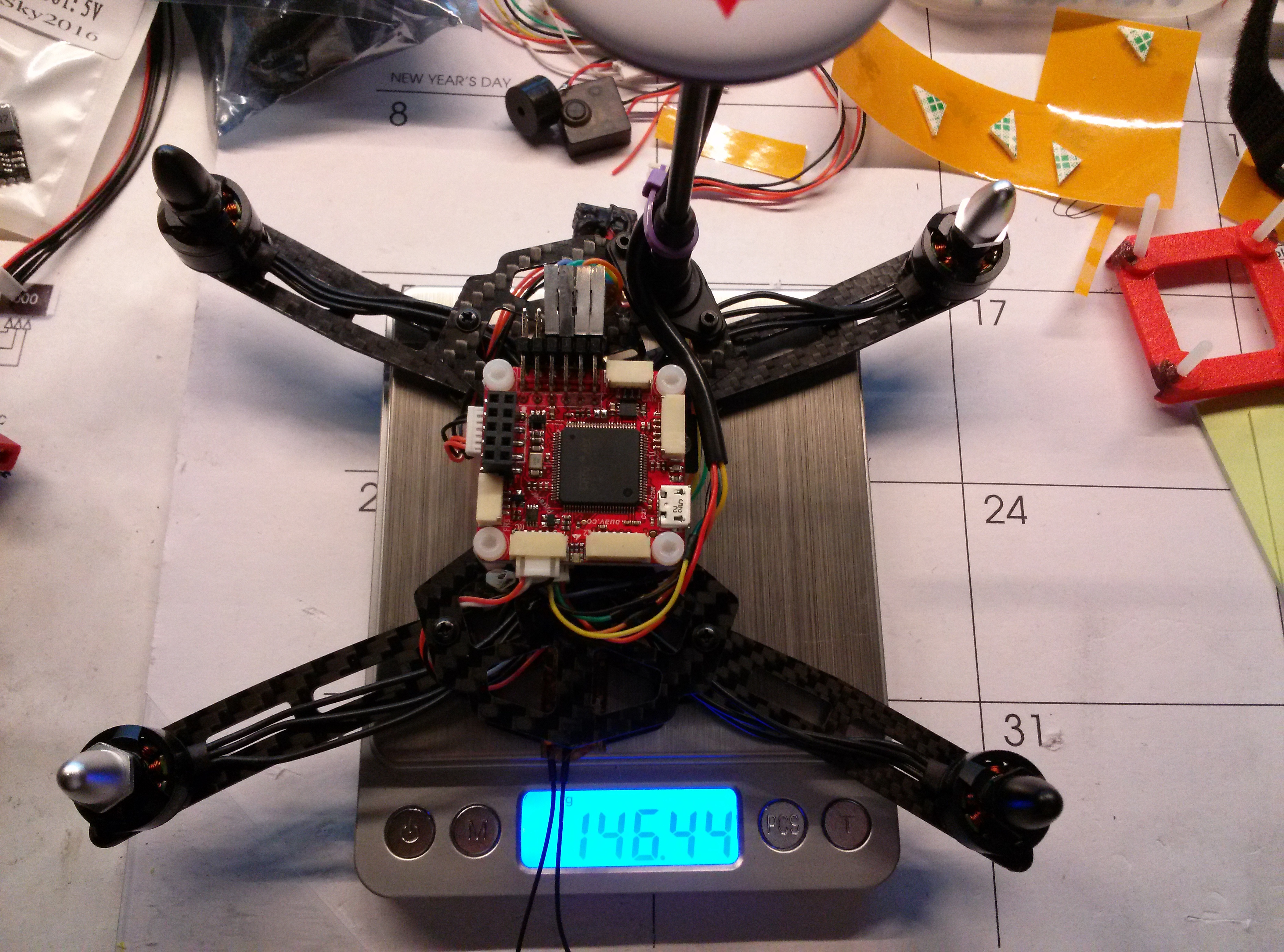
DYS1306 - 3100kv motors (maybe 2300kv can provide a better efficiency) with 5 inch props ~6A total at hover
Racerstar 4in1 ESC
Pixfalcon or Pixracer with PDB
BN-880 GNSS module
ESP8266 Telemetry Module
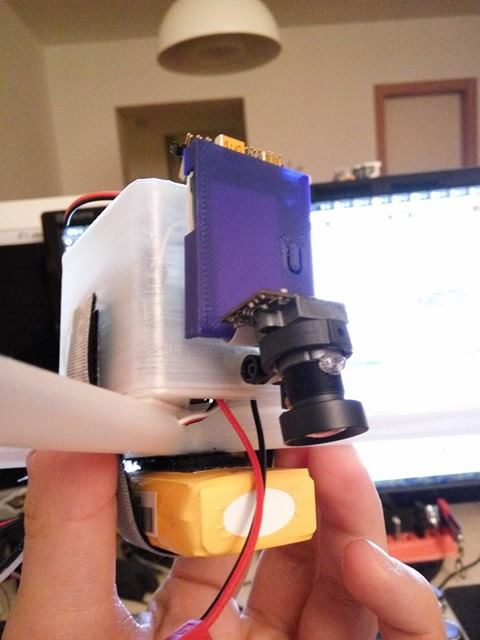
Foxeer Legend 1 with non distortion lens 4.35mm aspheric
I will refine the design to shed more weight to fit 2xLG18650 (100gramm) for an approximate flight time of 20 min and clean cable management. If there are any questions feel free to ask.
Looks great. As time goes on I think more and more of working to make a drone under 250 g, though my interest is more in Planes.
I noticed that FrSky is now developing receivers even smaller than the D4R-II.
See the XSR, which has all the needed features of the D4R-II and more, yet weighs in at under 4g. The connector is better also, being all in one for everything including telemetry, unlike the D4R-II where telemetry is a bit messy
That’s really great. What do you use for the camera?
ArduPilot has (or soon will have) support for brushed motors so that may be an option for small vehicles.
Really interesting idea. I’d love to see what you did with the camera, I don’t see any details in this post or the thingiverse link (and your Facebook post is inaccessible to me). I assume you set up a mapping mission and have it trigger off an RC channel?
Regardless of whether it’s actually under 250g or not, the advantages of a smaller platform are pretty intriguing. The smaller the drone, the less people seem to mind. And given the cost, I imagine you could deploy several at a time to run a job in parallel.
Thanks guys, this is still a work in progress so far im happy with the results. I will take a detail photo as how the camera is mounted. The foxeer legend provides the best “compromise” between weight (19 g without case and bat) functionality (pwm trigger), formfactor (flat single pcb, sensor attached by cable) and lastly short intervall between photos (1 sec) but the main drawback of these small cams is the cmos sensor with the rather slow readout speed. My first choice was the git2 (now with panasonic sensor) as they offer a great support and it is possible to configure shutter speed/iso etc… as well. As for the receiver i plan on using only esp8266 telemetry and remove the wifi receiver completeley to so the receiver is a temp solution for testing and tuning. I have some micro frsky on the way. Total cost are down to approximately 300€. I currently also build another one with a raspberry pi zero (benfinitiv HD WIFI). Once finished with the project i might consider a hk bonsai as an valid micro mapping wing. Regarding brushed motors i have yet to test how reliable/efficient they are i would rather see a e.g. pixracer with integrated pdb, which would safe a lot of weight.
ToDo:
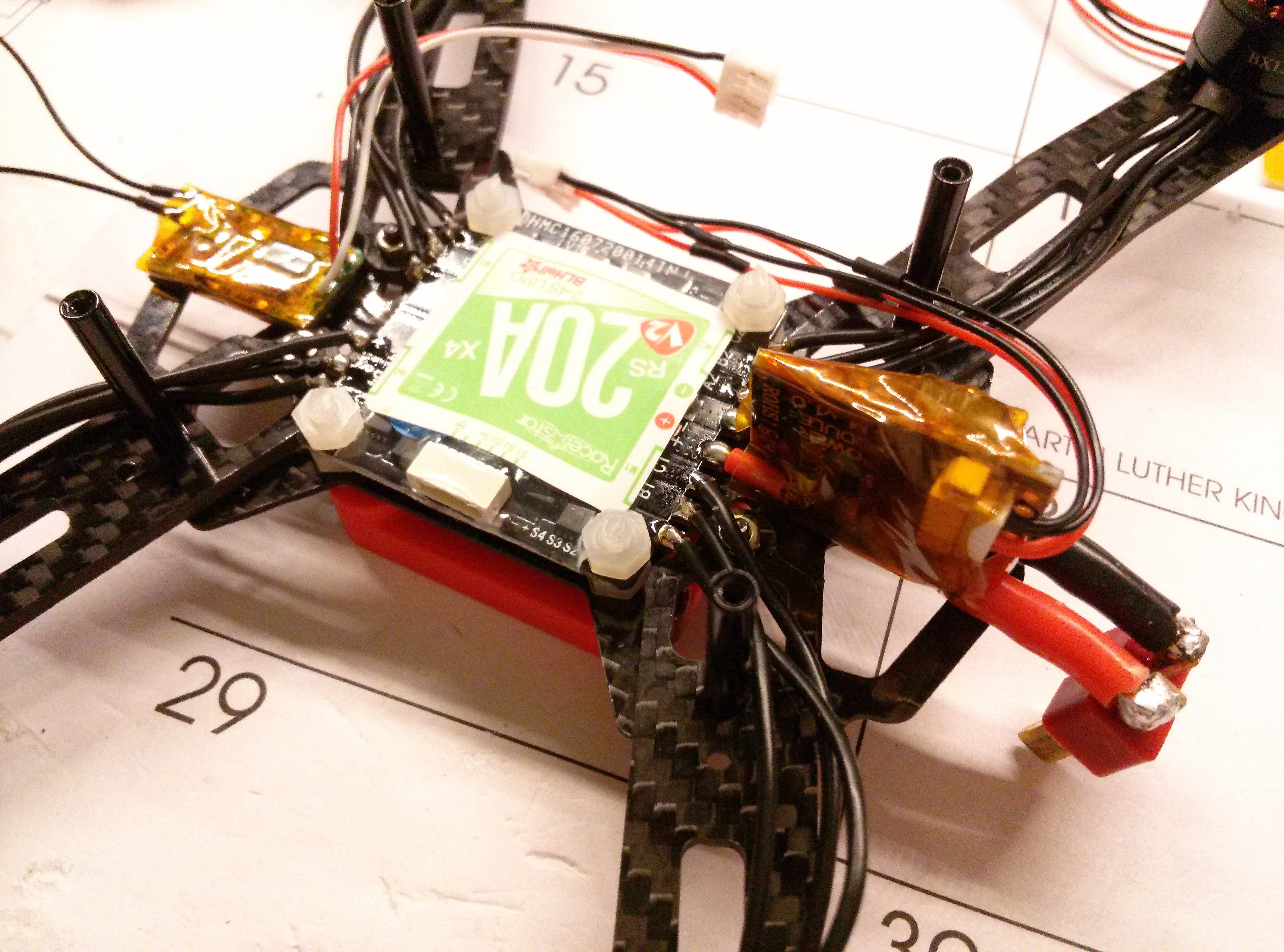
Lean cable management --> rounting cable trough the tubes
Bat mount --> might need rework now with strap
Weight reduction --> lighter 4in1 esc, ligther pdb with current sensor (might need to build one), propeller nuts (print some from petg/polycarb)
Any ideas in further weight reduction or improvements are greatly appreciated.
Update:
Same design but motor cables now run in the tubes for a cleaner design, will upload the design to thingiverse soon once copter is tuned.
Changed components are 4in1 esc hobbywing xrotor micro 20a with integrated apm power module and receiver fx400r.
As a next step it would be good to use another gps (MAX-M8Q GPS GLONASS BEIDOU 18HZ NANO RECEIVER with taoglass “sticker” antenna". Slim down the tower and maybe find more suitable propeller nuts.
Anyone have recommendations on the points above?
Attached you find the camera mounting picture. Camera can be tilted by hand in a next step i will use a micro servo directly with the servo function within ac, but i guess first i have to check if we can define a deadband…
Hi,
Just came across your post, and this is a similar purpose miniquad that I’m building.
Diatone blade 180
Dys 1306
Racerstar 4in1 esc
4045 gemfan
pixracer
Mobius2
I just had a horrible maiden flight and realized the learning curve on Arducopter is steep for lightweight overpowered quads. 4 broken props and still cannot get off the ground for a gentle hover.
I’ve build a similar mini quad on dRonin flight stack, but I want this new build to use Arducopter for all the autonomous functions.
Hey, could you post a picture and a log so we can troubleshoot the setup. Initially I build the setup for test purpose also with a diatone but it felt too fragile and hobby grade. I’m very satisfied with the 3d printed setup as it works flawless execept the current camera selection provides a lot of rolling shutter. This project is still work in progress and will be refined.
How is your compass reading, with it mounted on the deck? I’d like to get rid of the gps stalk, costing me 10g.
The plan is to mount a gutted mobius2 under the top deck. Battery goes under bottom deck.
Have you flown yours yet? would you mind sharing your parameter file? As I mentioned, I cannot get it off the ground. I think I already destroyed the voltage reg/gyro from crash
This is the previous one on dRonin and revolution mini. It has fpv cam and a mobius1 recording cam. I’ve since updated to carry 3s 850mah, among couple other things, and keeping <250g.