Hello all,
I recentlt got a Makeflyeasy Freeman 2100 vTOL kit. I am trying to get everything working right before I start flight testing the aircraft. I am pretty new to drones and flight controllers in general and have run into a few issues that I can’t figure out. I am using mission planner (ardupilot software) to help me set up my drone.
Issue 1: motors 1,3, and 4 take longer than normal to connect. Issue 2: When they do connect, motors 1, 3, and 4 start spinning up without any input from my radio. My expectation is that none of the motors should be spinning until I give input with my transmitter. if I put my roll/pitch stick to the top-right most position as well as the throttle/yaw stick to the bottom-left most position all the motors stop spinning. I want to be able to verify that the motors respond the way they should to what I command from my transmitter as well as input from the IMU/magnetometer. I am using a pixhawk 2.4.8 with a Spektrum AR8020T reciever and a Spektrum NX8 transmitter. I am also using a Ublox m8 gps module.
Any help or resource you could provide would be greatly appreciated
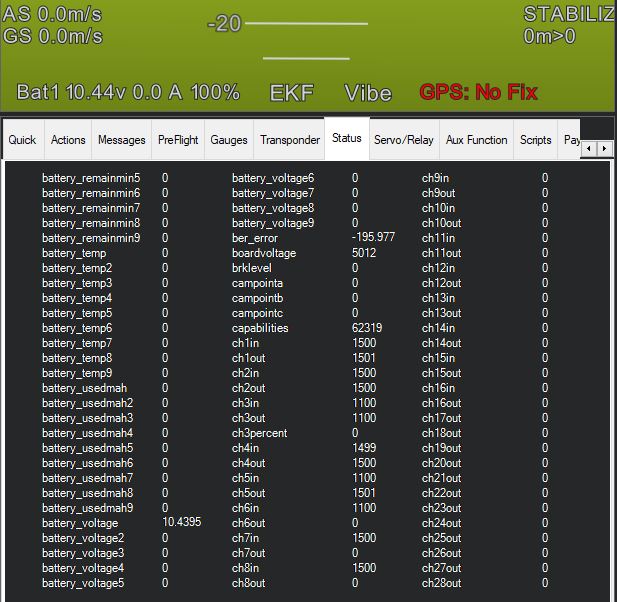
Thank you for replying. Sorry it took me so long to get back. I updated to the latests firmware and connected all of my devices except for the airspeed sensor because I haven’t gotten one yet. I have also successfully re-calibrated the accelerometer, compass, and radio. am still not getting my motors to spin up correctly. I think it may have something to do with the servo outputs but I’m not sure what to do about it. I should see some min value for the motor channels which are servo9 - servo12. I’ll try and upload screenshots of what I’m talking about. What do I need to do to enable the servo outputs to control the motors? If I am doing the wrong thing, what should I be doing instead.
If your mission becomes valuable (such that the cost of the servos isn’t a primary factor), I’d like to make you aware of a couple products of ours, which you may find interesting. We offer a couple of micro servos (100oz-in and 150oz-in) that fit perfectly within the stabs, plus an all-alloy 905oz-in robotic-type brushless servo capable of accepting a 3S source and expressly designed to swing the motor/prop 90° to translate from vertical lift to forward flight. These are rugged and have all metal gear trains.