I am using the methodic configurator and I am up to test flights. Given the difficulty of physically accessing the cube orange USB port on my drone and the number of test flights I am hoping to do I would like to have the configurator work via telemetry.
Mission planner connects reliably via UDP and TCP using a RFDesign TXMOD unit with zero issues (Yappu on the TX16S has problems with this setup, but mission planner works well).
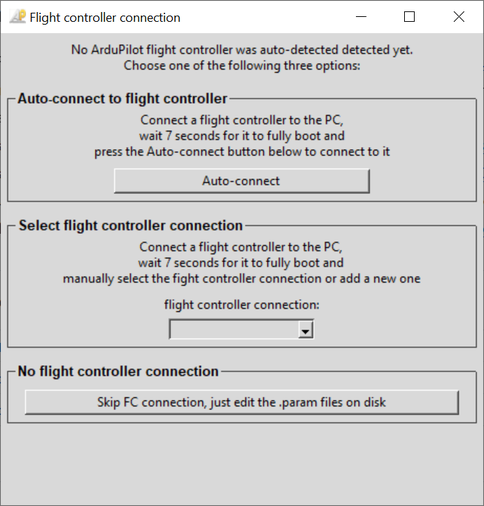
When I try to connect via the configurator using the same TXMOD IP and port (i.e. tcp:192.168.4.1:23 ) it fails with “No MAVLink heartbeat received, connection failed”. I have made sure that mission planner is closed and I have also tried running configurator as the first application on boot (before mission planner has ever been started) just in case there is some conflict.
What I have noticed is that once I’ve tried connnecting with the configurator, mission planner won’t connect until I close the mission planner, so it does appear to be doing something…
Any tips?
Thanks!