Howdy. I am trying to configure F9P ardusimples for RTK on the brand new cube orange plus with the bronze metal finish. I was able to get it to work on the old cube orange plus but for some reason every time it boots it boots to north regardless of its direction. But despite this it still registers yaw and it does not have a heading drift and I do have RTK fix. I am running 4.4.0. but switching to 4.4.4 presented the same issue. I have been trying to work through this for a good week or so. Any guidance would help. Cheers!!!
Also, if anyone has a spec sheet on the new orange plus with the metal finish that would be sweet. I have a piece of hardware that is only able to work on a very specific build of a prior firmware version.
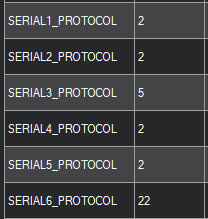
Nothing to do with firmware version and everything to do with poor configuration. It appears you want to use moving baseline, but you only have one serial port set up for GPS (protocol 5). And are you really using 4 different telemetry ports?!:
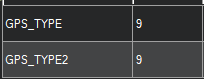
You have no GPS types set for uBlox moving baseline (types 17 and 18):
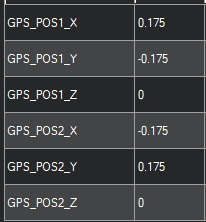
And unless your antennas are placed perfectly diagonally from one another, these offsets are probably wrong:
I find that hard to believe. And if you are indeed using (and need 4 telemetry ports), you will not have one available for the second GPS module. I’m also not aware of a Cube carrier that breaks out SERIAL5 for general use. So your configuration is very odd.
I’ve worked with it extensively (the wiki’s own GPS-for-yaw example video is my rover), and I know what to tell you:
The parameter files you shared both differ greatly from one another, and neither makes sense for the reasons I’ve stated.
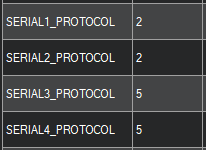
While your second example might fly well, it is misconfigured (seems to be using two DroneCAN GPS modules, despite having some serial ports also configured for GPS), and it definitely isn’t using GPS for yaw.
Exactly what products are you trying to configure? Make/manufacturer (not just module type)?
I never recommend this particular product because it is nearly incompatible with ArduPilot and very tedious to set up. Nevertheless, it CAN be done, but follow the guide carefully and do not skip any steps.
In that guide, they use SERIAL1 (Telem1). You can use SERIAL3 (GPS1) or SERIAL4 (GPS2) if you wish, just modify the steps to suit.
For others reading this, it is far preferable, in my opinion, to use two SimpleRTK2B boards and follow ArduPilot’s own wiki, which allows for more automated (and reliable) configuration.
Edited my post above with a recommended ArduSimple configuration (uses two serial ports).
I don’t know of a US-manufactured solution (and ArduSimple is from Spain), but the CUAV C-RTK2 HP is a good choice and only requires a single CAN connection.
Despite my recommendation, you can indeed get the SimpleRTK+Heading board to work on a single serial port - it’s just a bit of a pain. So, you don’t need to spend more money right away.
I was looking at the CUAV. their flight controllers look like good options too but im trying to only by electronic components which are made outside of mainland china.
Ill get to rockin through that tutorial. It is very likely I missed a step when trying to do it from memory.
Edit: turns out GPS_AUTO_CONFIG was on. That might be the source of the issue