I spent a little time looking into this and I think I found the issue and a fix ?? PR here When Mode:auto_loiter becomes active the controllers are not updating their last called time. Then upon starting the mission because the controllers have not been recently initialized we get a nice SITL PANIC about be uninitialized.
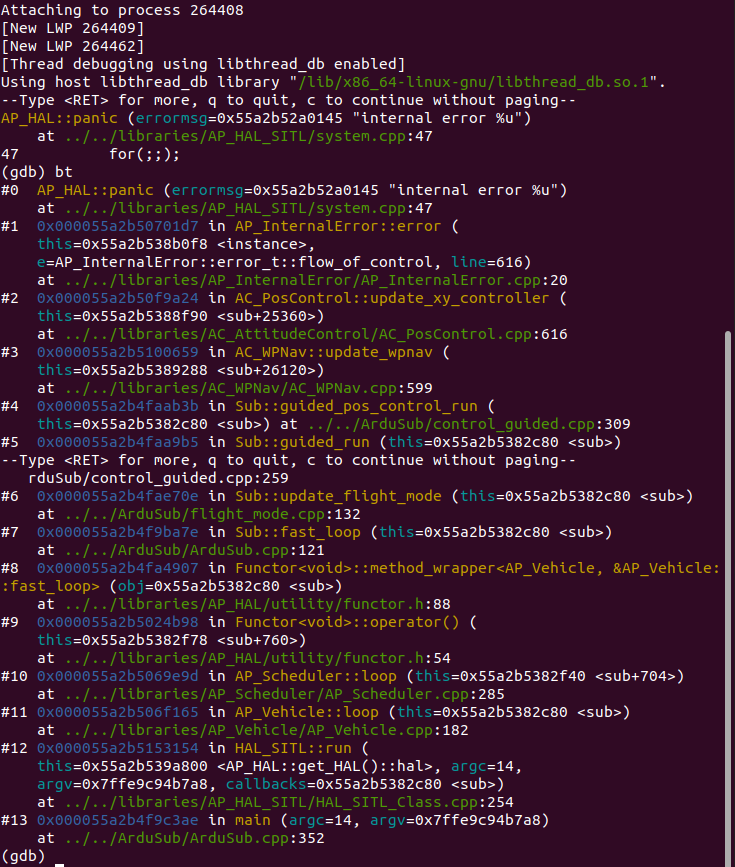
BTW if you leave off the --gdb the stack trace will be printed and captured showing the line number of Panic. /Tools/autotest/sim_vehicle.py -v ArduSub --console -L newyork -D You can then share the offending lines in the screenshot above You can attach to GDB after a panic as well.
@hendjosh
I have tested the PR, it seems that the PR resolves a part of this issue.
Unfortunately, I can still trigger this issue for the following steps:
Absolutely, I like to check other modes!
I can only reproduce this issue during the circle mode after I repeatedly test the PR on SITL.
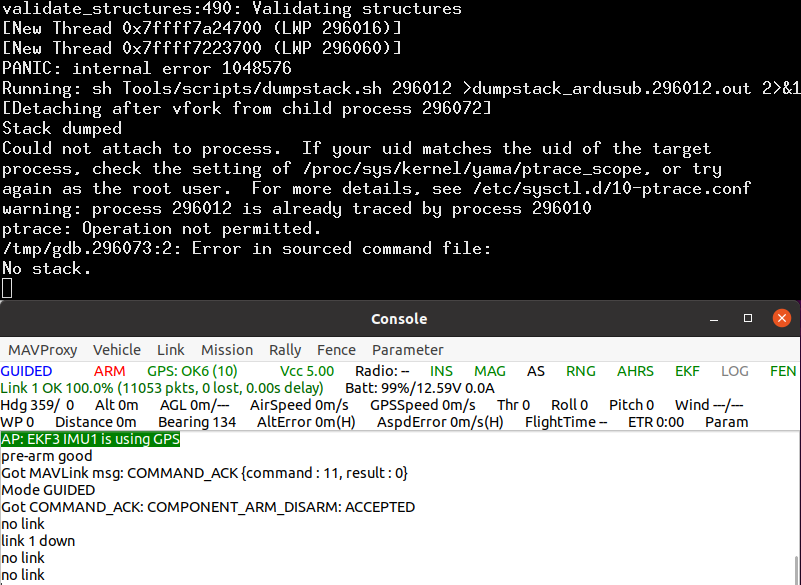
I found another memory error, but I guess that this is not related to the controllers initialization.
When a waypoint leverages a “Terrain” reference frame, it also leads to a memory error…
I know that using the terrain reference frame is weird in ArduSub. Just in case, I would like to let you know this
Check the PR above again for the fix for circle_mode.
I could not replicate the Guided_mode error in pos_control_run() given your steps but didn’t spend enough time on it.
In the PR I also included a change for guided_mode where your internal error comes from for something that didn’t look right. But I don’t think it is quite right since I can’t replicate the error. There might be something else going here
Thanks for the commit
It seems that the PR has fixed the controller initialization issue for the circle mode.
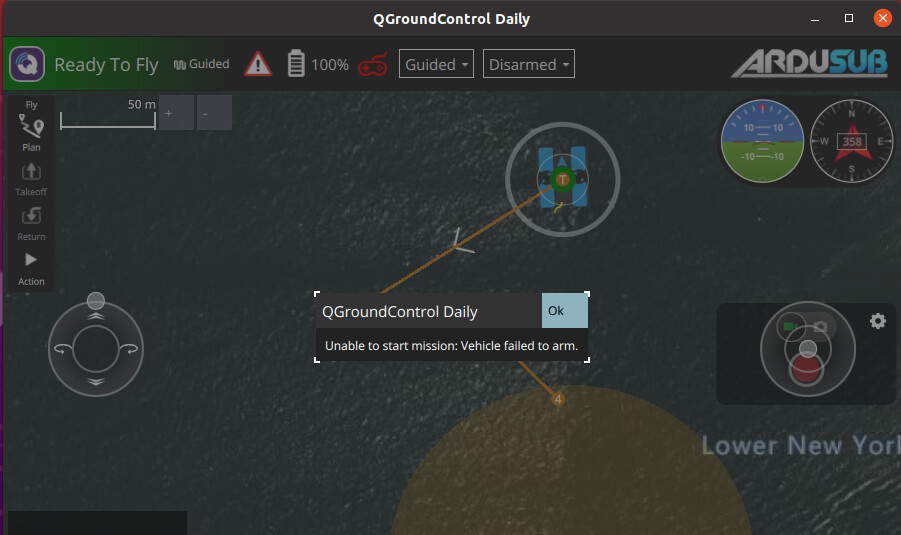
I notice that the issue for guided_mode can be reproduced only if you use QGC daily version (048081c44).
Huh that is weird about the QGC thing. I don’t think that has anything to do with the issue, but of course I’m wrong a lot.
I managed to trigger an error in control_guided using mavproxy
start sitl sub as usual
mode guided
arm throttle
Get an internal error
I still haven’t figure out why this one occurs or how to fix it. It is not quite like the others.
Are you using master + my small PR only? I noticed before that the mission you gives the following outputs. BAD NAV AltFrame because WP2 is not in REL_ALT (the only accepted frame it seems?)
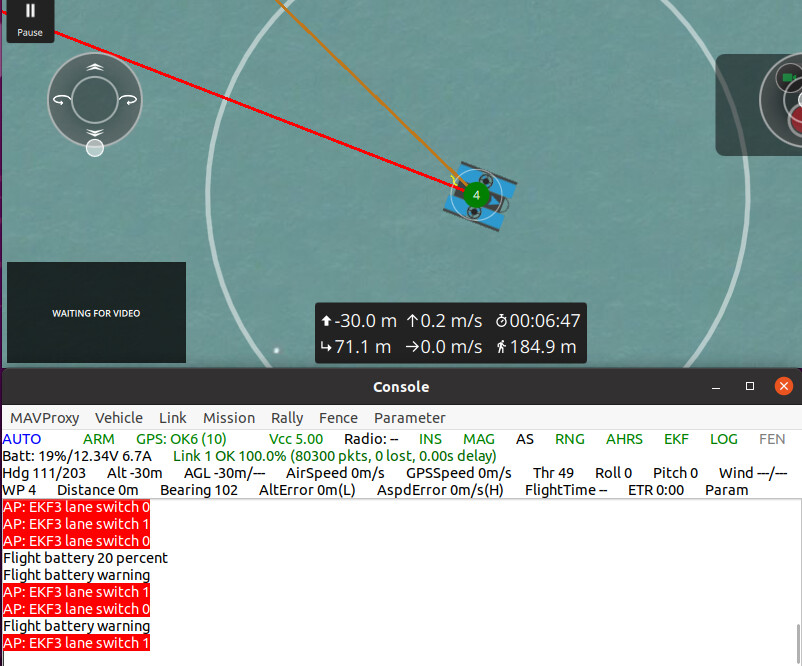
Also any chance you see a bunch of EKF lane switches in SITL? Totally separate issue. But I rarely use sub sitl so there may be settings I need.
It seems likely to me that the control_guided issue occurs only if SITL increases simulating speed through the –speedup option.
The reason is that I could not reproduce the issue when I used --speedup=1.
Are you using master + my small PR only?
Yes, I tested the master + your PR.
In specialty, I saw the bunch of EKF lane switch 0/1 after the vehicle finished the mission.
OK, I was able to reproduce here - great instructions, thanks.
The only thing I had to do differently to the above instructions was to “mode guided” before “mode auto”. Also turning off the GCS failsafe caused less pain…
@Leonardthall this is another case of the sanity check that we’ve been calling the position controller regularly is failing - so we’ve started to call the position controller again after a prolonged period of time but nobody called init.
Yeah my reproduction is mode guided then arm and bam you hit the error.
However, my trouble with this one is that I think we are keeping the xy_controller initialized via the call wp_nav.wp_and_spline_init(); If you follow it down eventually calls AC_PosControl::init_xy_controller() which sets _last_update_xy_us
My current theory…
I think there is an extra delay when we arm which means it takes too long between the last init_xy() and calling is_active_xy()
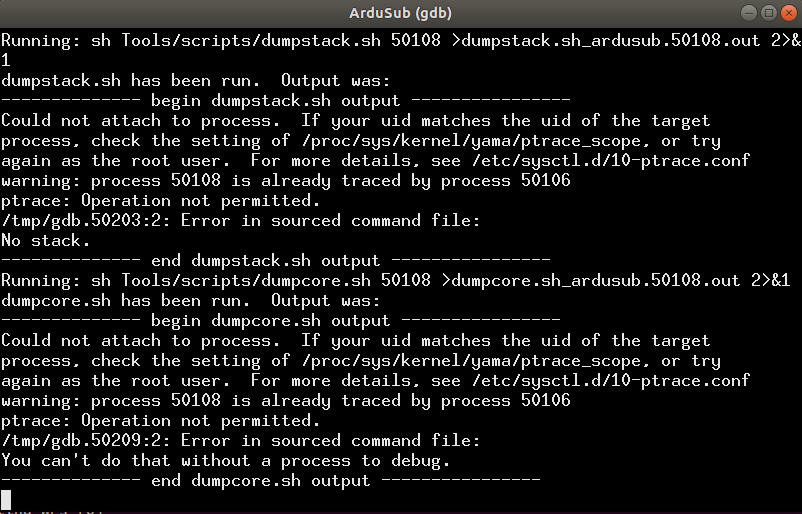
 You can attach to GDB after a panic as well.
You can attach to GDB after a panic as well.