What is the maximum wind speed people normally fly in? I see on Google the recommendation is a maximum of 16km/h.
My drone has 16’’ propellers. I was flying today and crashed, again. According to the weather app the wind was around 14km/h when I started flying. I was flying on an oval/rugby field/soccer field. I think there was a gust that just took the drone. It flew faster than it can fly when I push it to max speed. I actually let go of the power and pushed throttle to minimum but it just kept on going. It hit a stainless steel structure. Lost two arms.
I noticed the one wire of the ESC was loose. The ESC was attached to the leg. I don’t know if it came loose before or after the crash. I will need to check the logs.
Glad I built it myself and didn’t buy something like a DJI. Now I can rebuild it at least
There are many factors having an impact on that answer. …
-How powerful are the motors used?
-What size props?
-How aerodynamic is the drone?
-How well is it tuned?
-What is used for location fix?
…and the list goes on.
What you have to keep in mind is that commercial drones are usually well designed and tested prior to being sold. As such engineers can calculate the likely outcome, performance rates, flight time, max speed,…
Building your own drone can be very satisfying but also frustrating when encountering problems like you did. I lost some over the years and just recently a rather expensive one. But if things go well and you get better in understanding the various principles involved then building your own drone to suit is a great experience.
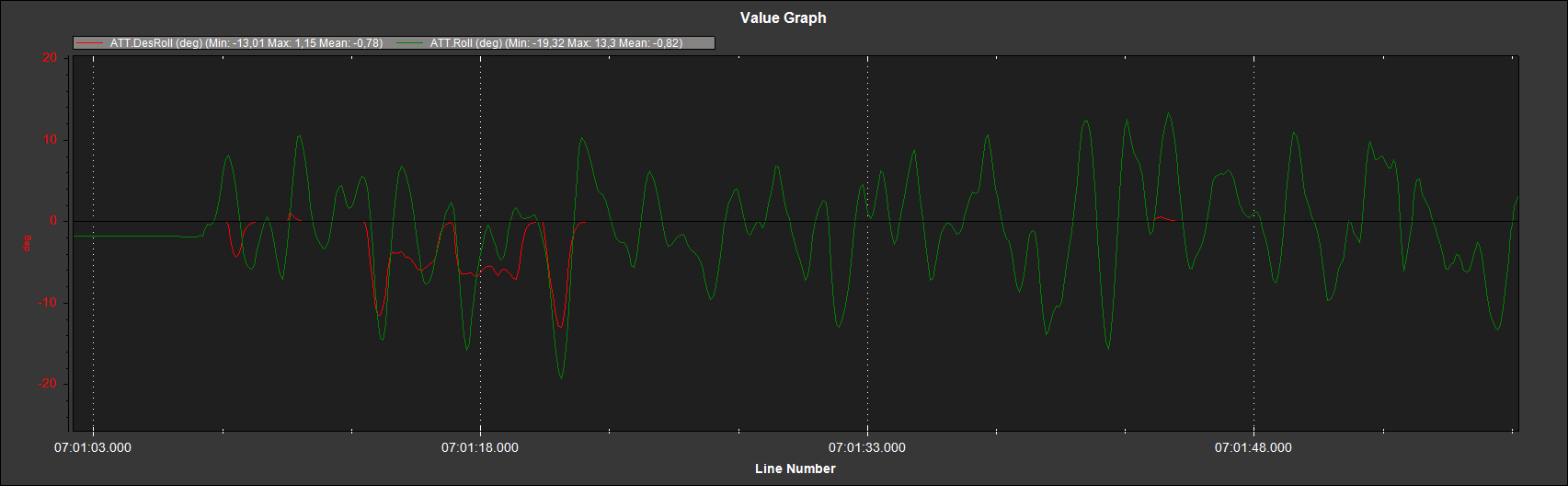
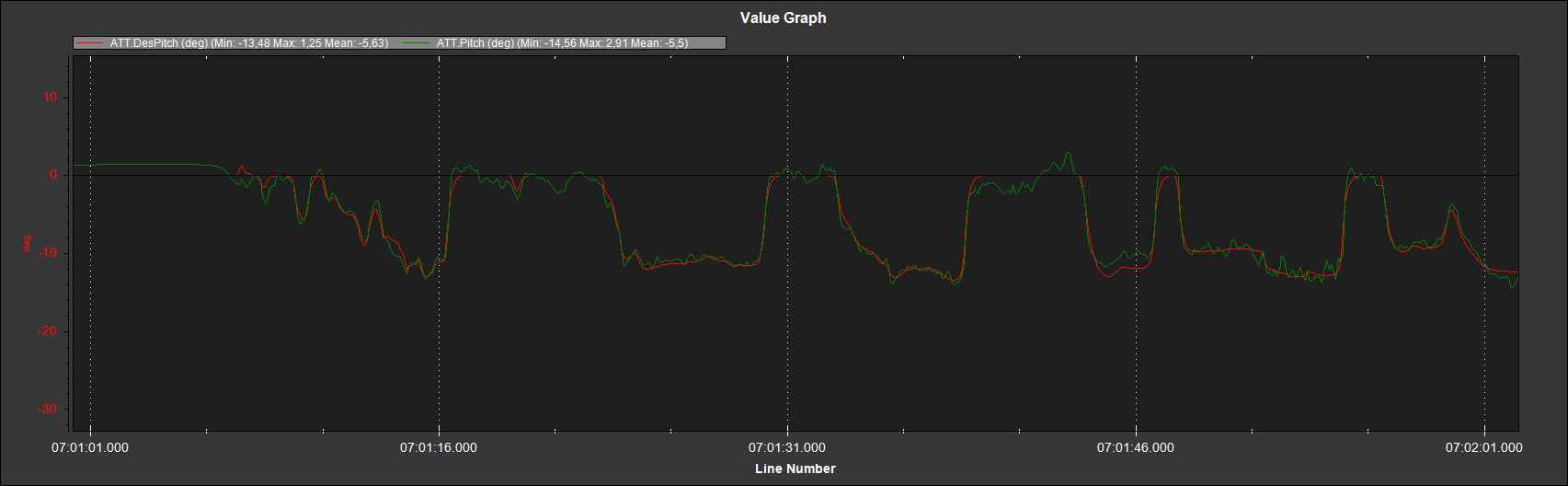
I think that was almost a miracle that your drone flew. The PIDs of roll axis are bad, pitch need tune but at least it follows the desired angle, so to start, replace the roll PIDs for the pitch values.
And about max wind speed, I usually use 2/3 of the max speed that the drone can achieve. So for example if the max real speed of your drone is about 20m/s, I wont fly with winds of about 13.2m/s
That wouldn’t be the question I would be asking, As @davidae says the tune on this craft is very poor. It’s unusual and a indication of a bad tune when there is this much disparity between Pitch and Roll:
ATC_ANG_PIT_P,17.50386
ATC_ANG_RLL_P,3.8475
To give you an idea, an 8kg Octo that we use for survey work each month has flown a mission in gusts up to 54km/hr.
We have flown above that speed but Auto was not tuned aggressively so I had to retrieve the copter in Stabilise.
With a good tune even the Solo will cope with >24km/h.
I have a similar sized quadcopter with 13.5” props and have flown it in worse conditions than you describe. I do avoid gusty days, but 8-12 knot wind conditions with minimal gusts don’t scare me much.
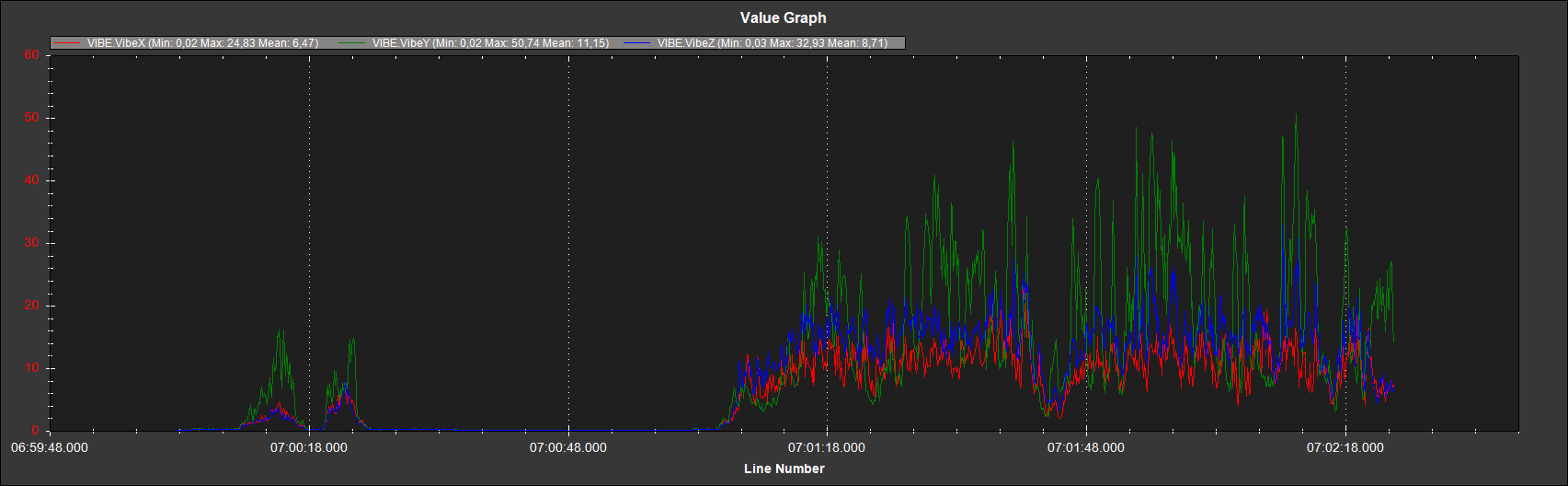
It appears the tune is your problem. Autotune isn’t a magic bullet. Just because it succeeds doesn’t mean that you have a good tune. In fact, the documentation leads you to several post-autotune steps to ensure that your copter is in good shape to fly.
It’s not strange, many factors play into a good Auto Tune. Low vibes would be the primary one. Configuration of the Dynamic Notch filter is another. But, it’s no band-aid for high vibe levels. Address that 1st and then if they can’t practically be improved configure the Notch Filter in any case.
I will spend some more time to look at the noise. Thank you. First might need to order a few motors again. The wires ripped out of the one and I see some of the wiring broke inside the other.
Might first post some noise info before I fly next time.
I think the 260KV seems to be enough for me with the 16’’ blades. It seems to me I can hover at 50% throttle at 1.8kg (full load) so that is fine from what I understand.