Looking at my params, RC3_MAX=2000 and MOT_PWM_MAX=0.
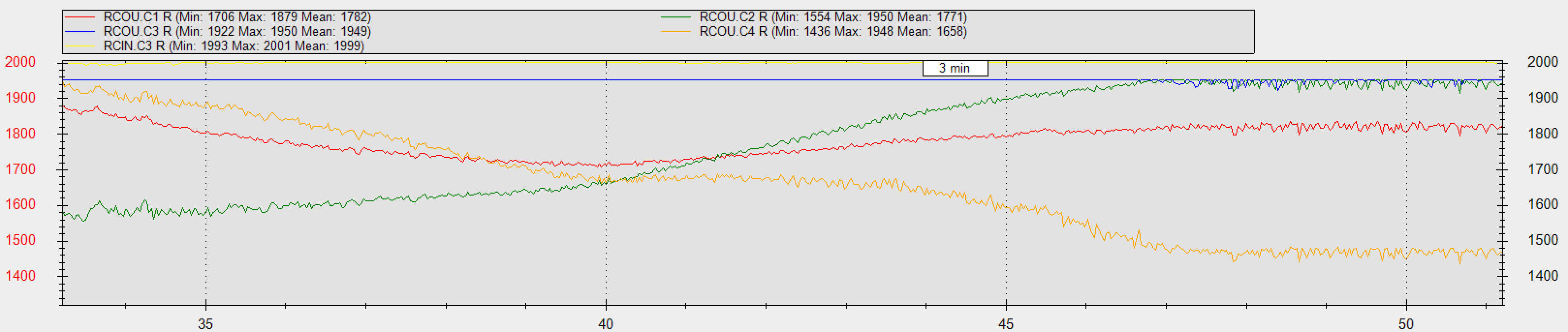
This is a load test on a heavily loaded copter. It is almost about to lift off, but it won’t. Except for C3, the other motors don’t seem to be producing all the power they have – PWM at 1436 for C4 seems super low, 1554 for C2 too. Why won’t they get close to 1950? Stabilization surely can’t explain that gap
I checked the amps, the battery should be able to handle fine at that level. ESCs at about 60% their max.
I think the difference likely is because of stabilization. It’s very likely trying to maintain it’s yaw and is having troubles. The two lowest motors are 3 and 4 which are both clockwise rotating motors. the lowest is “3” which is forward left. Perhaps there is a COG issue as well.
Also I suspect the vehicle is not powerful enough to carry the load and maintain attitude control. In the graph, it’s using about 70% thrust. If it’s not off the ground at 70% thrust then it’s under powered I think.
And for that load test only, if I wanted to give max power to the motors, would I adjust ATC_THR_MIX_MAX? I’m confused by the “max” being 0.5 (which it is by default).
I think that number should really be thought of as a prioritisation of attitude-vs-throttle where 0 = always prioritise throttle and 1 = always prioritise attitude. So I think you should actually reduce that number. I’m not sure it makes any different at high throttle levels though so I suspect it won’t help. Another alternative is just to reduce the attitude gains. The best solution though is to somehow increase the power of the vehicle… that’s the underlying issue of course.
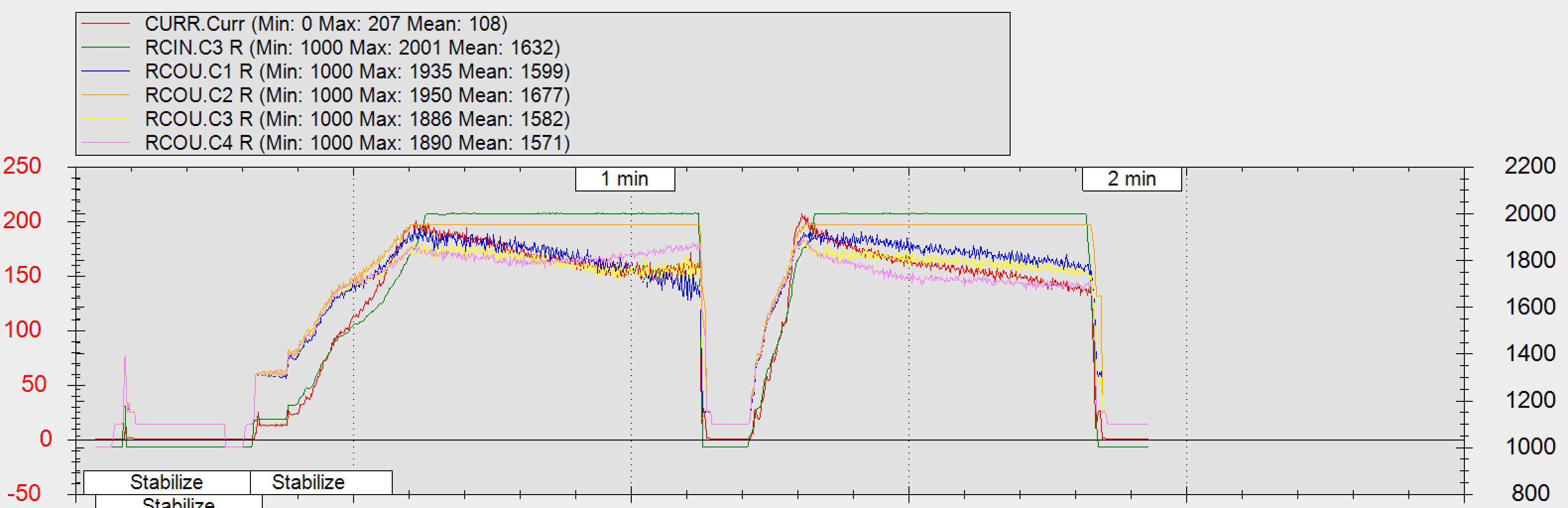
Somehow the current is decreasing quite rapidly, I’m not sure if this is because of the FC reducing power or because power is simply not available (battery, wires, etc.). Can you tell?
In parallel we’re going to try another power setup as you suggested.
EDIT: we use 4 of these motors (with their ESCs and props) https://www.kdedirect.com/collections/uas-multi-rotor-brushless-motors/products/kde5215xf-330. It doesn’t look like we’re getting the 62A+ per motor at full throttle. Even at best, looking at the logs we get ~190A total, that’s 47.5A per motor, so we’re missing almost 25%. Very low PIDs for ATC_RAT_RLL, ATC_RAT_YAW and ATC_RAT_PIT don’t help.
Current tapers off here in these tests because the average PWM tapers off (because of stability loops winding I term), heat may be a variable in half minute runs. In the second rip, you hit near 206 A and 28 V. Say 5750Watt, maybe 4g/w efficency… Maybe 50 lbs thrust in that burst. What’s your intended takeoff weight? I’d hope we’re talking ~22 lbs.
The 62a figure cant really be expected. The 8S voltage sags rapidly, so theoretical peak rpm and load is unrealistic. The 28v is 15% under the 8S max, and the aero load is non-linear with rpm(purely a function of voltage for a given signal). So, the ~20% under performance from lab-like figures adds up to me.
Does the drop in amp seem normal? We go from 206A to 164A within 10 seconds during the second test. Meanwhile voltage is stable (28.12V to 28.09V). So 5793W to 4607W, that’s a 20% power loss. You mention heat, could this explain (resistance)? The 10AWG directly off of the batteries do get pretty hot.
I’m still unclear if this is the flight controller driving this and actually decreasing throttle, or the other way around? Is there a way to tell which is the action and which is the reaction?
It’s 110% the flight controller decreasing overall demand as the run goes on. My avg PWM comment was along those lines. The avg signal drops to near 1800ish, The amp demand will be proportional (and falling) for sure. The heat comment is a minor factor, but the resistance certainly doesn’t get better as the run goes on.
side comment:
You get a lot of options in the KDE ESCs. You can go to ‘fixed’ range and adjust the arducopter parameters to get really dialed in. For example, stock parameters allow 1.15ms to 1.95ms signals. It may be (bench test!) that your drive train dynamic range is 1.12 to 1.83 (just examples). That means you could be sending slightly less signal when you are clipping one low, and you are not getting any more rpm by sending 1.95. Anything over 1.83 would be exactly the same, and the flight controller would be annoyed that there’s no change in the output.
If your desire is to do true unstablilized full power rips, you can use the compassmot calibration feature and throw out the results if you wish. This is with the vehicle held down. The signal going to the motors does not obey MOT_SPIN paramters. It may do something like pass through the calibrated radio Ch3. If you have a little PWM meter, it could help you understand. Again, no stabilization and no arming checks with this feature. Be careful. Also, the down side for this feature is I’m not sure if you can observe or log the power module data (anyone tried this?)
Just looking at the logs quickly, it’s Motor #2 that is maxing out. You can see it in the log you posted as well. So to maintain attitude, it needs to reduce the other three.
You can try reducing the yaw PIDs or set the ATC_YAW_HEADROOM to be smaller (like 50). But in the end, all you’re doing is sacrificing attitude control for throttle. I think you just need more power from the Battery, ESCs, Motors and Props.
Interesting, we’ll explore what can be done on that front, though as Randy mentioned one of our motors gets maxed out so the range shouldn’t be an issue?
rmackay9: I think you just need more power from the Battery, ESCs, Motors and Props.
Agreed, we’re trying to debug and figure out which is causing the issue(s) more specifically.
ESCs (link): they are rated up to 75+ A max continuous current, since we never exceed 55 A in our tests, these should be good.
Motors (link): they are supposed to provide up to 8.7kg of thrust each, at best in a lab. So that’s 35kg of thrust. We loaded our vehicle so that in our test its weight is 25kg.
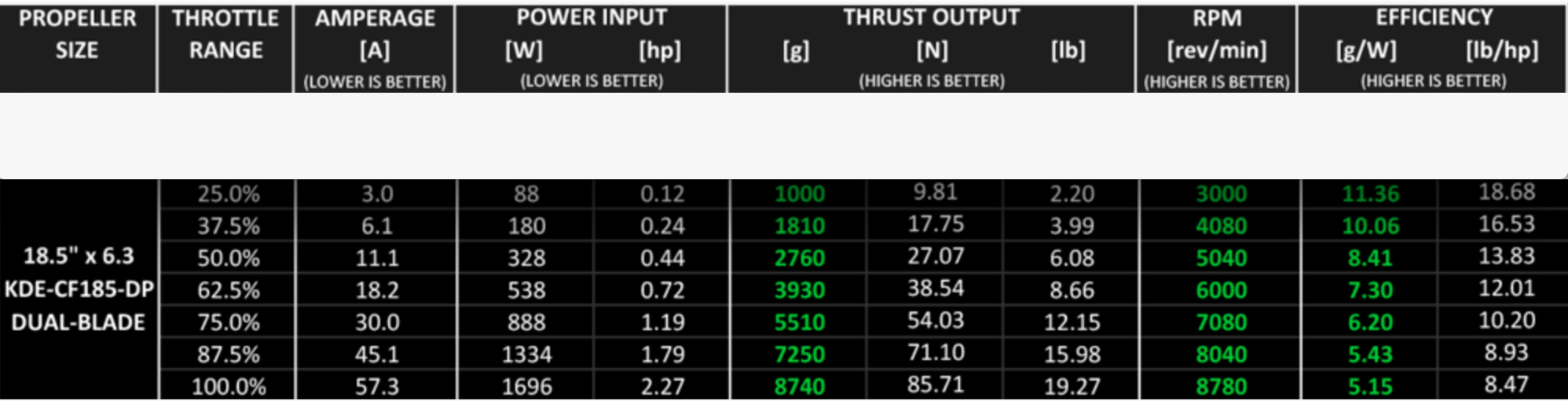
Props (link): we tried these 18.5 " x 6.3, as per the above table. We also tried larger 20" x 5.5. Slightly better in the sense that the vehicle can take off but I wouldn’t say it’s super stable / maneuverable – not as if we had close to 40kg of thrust available.
Batteries (link): we use 2 of these in series in our test. They should provide between 160A to 320A. Best case at peak we’re pulling 220A according to DF logs. We bought these used though.
In the meantime, we’re going to spend more time on PID tuning so the FC doesn’t waste too much in stabilization. If there are any recommendations in that area for a heavy quad, please let us know.
Have you actually performed a thrust test on an individual motor/prop combination?
I have seen a few disasters (build wise) when web specs from suppliers are used then expected in real life.
There are many many things that change a props performance.
From your tests it seems you are getting about 6kg of thrust per motor at max.
Full vehicle tests. We do realize there will be losses (FC stabilization, aero, frame stiffness, voltage sag, etc.) and the idea was to test the system end to end to take all these into account.
Speaking of voltage, does the voltage sag we’re seeing look normal? 28V under load for an 8S.
25kg? I think a sane takeoff weight for this power system is more like 12-14kg. It’s not an issue with any particular component is this case. From a very high level view, we’d take that 35kg thrust figure, take 20% off then divide by 2. Takeoff is 14kg, ballpark.