I have connected the pixhawk cube orange and jetson nano for communication using mavproxy.
I have established a connection for pixhawk and jetson using GPIO AND TELEM2 port.
then I run a mavproxy link command on jetson nano terminal .
using this below command .
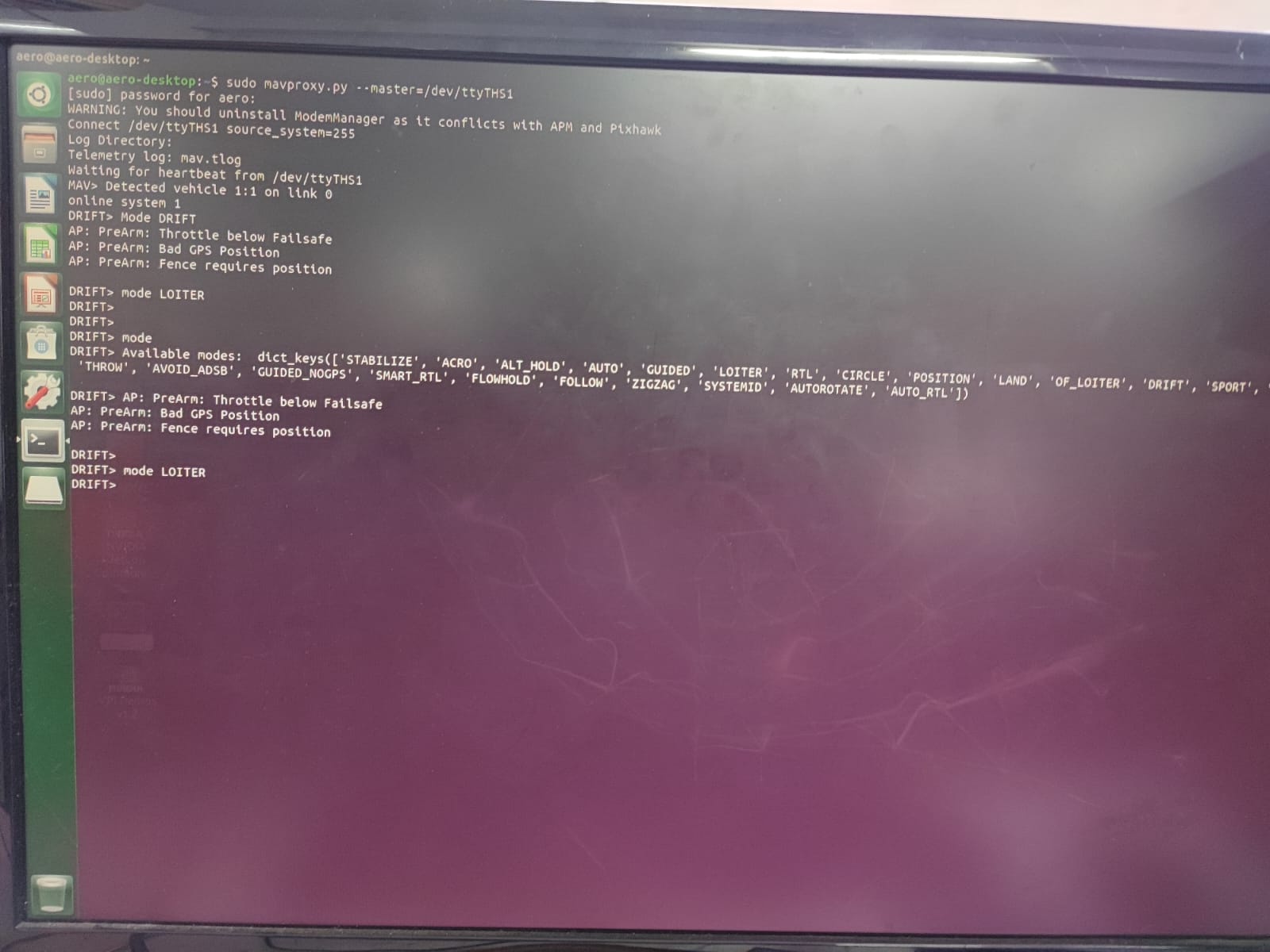
-----sudo mavproxy.py --master=/dev/ttyTHS1---------
It got connected and communication between pixhawk and jetson nano is done
I can’t change any flight mode from the terminal but it changes modes when I give from RC
like when i type >>>mode it gives output of different modes but when i type >>>mode STABILISE it do not change the mode,Also if try to change mode though our RC connections all logs are displayed and mode gets changed.
I get the same error when my GPS is locked or in modes that do not require a GPS lock.
I checked all your links and mavlink extensions but I’m not missing anything.
At the same time, I did not encounter problems when doing the same operations on my old pixhawk orange. I am currently facing this issue on pixhawk orange plus.
Can you help me with this?