Thank you for this detailed and thorough explanation! This has helped me understand so much about the routing process! I do have a few questions when applying this solution specifically to my project.
For my project, I am trying to use Solution 1 for communication. My connection is like this: sensor[ttyUSB0] → Rpi companion[Serial0] → flight controller[Sik Radio] → GCS[COM#]. The sensor sends ASCII data at 40Hz which I would like to receive via UDP and utilize on another program while simultaneously using Mission Planner
I have set up my message in a similar way with the guidance of another user on this forum. I do see some key differences compared to the one you described in solution 1.
VS.
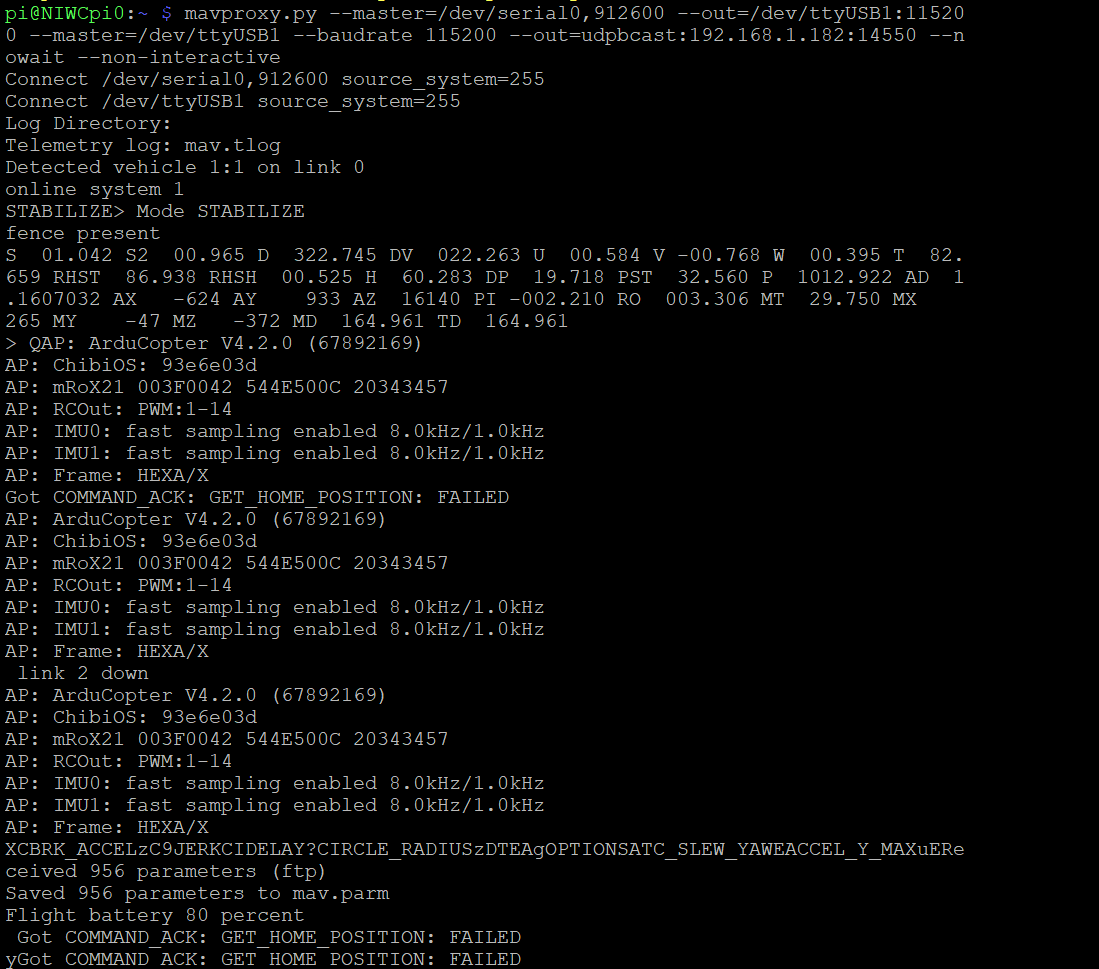
mavproxy.py --master=/dev/serial0 --baudrate 912600 --out=/dev/ttyUSB0:115200 --nowait --master=/dev/ttyUSB0 --baudrate 115200 --out=udpbcast<MY_IP>:14550 --nowait
The user insisted that the flight controller must always be master so rather than having two “–out” as the author described on this blog, I set the flight controller[Serial0] as a master out to the sensor[ttyUSB0] and the sensor as another master out to GCS via udp broadcast. This yielded the results below
In this case, should I continue utilizing multiple "–master"s, one for the flight controller to mission planner and another from the sensor to UDP broadcast for my data science objectives? Or do I just need to set one up with multiple "–out"s and the sensor data will still be transferred through?
Thank you!