Hi,
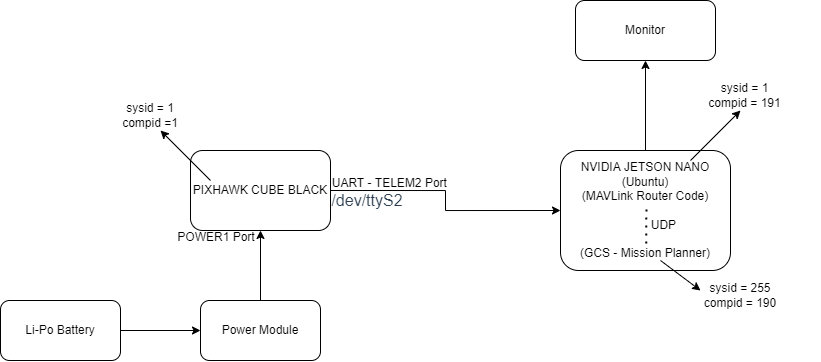
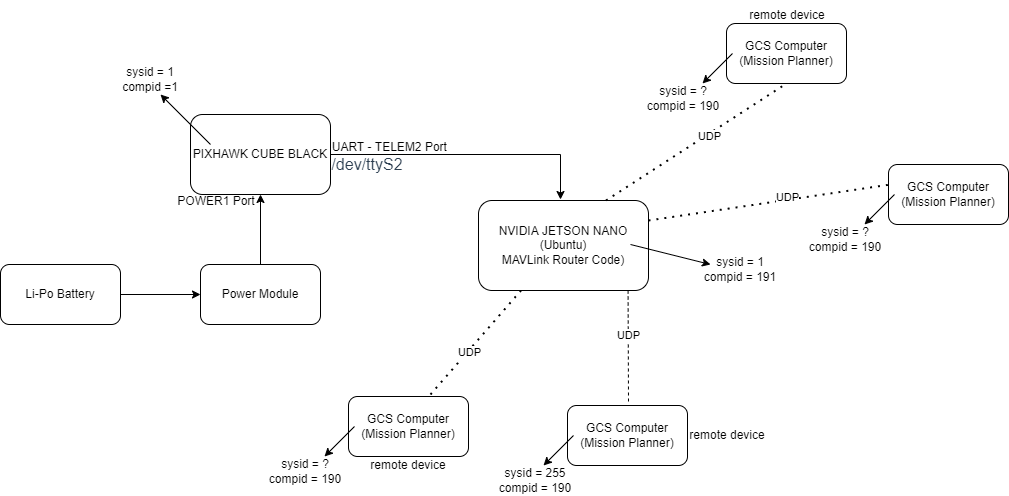
We installed Ubuntu on Jetson Nano, and we installed MAVLink Router (GitHub - mavlink-router/mavlink-router: Route mavlink packets between endpoints) to Jetson Nano. (by following the steps in that link)
We runned mavlink-routerd, and we read some messages on Ubuntu terminal such as,
message from 255: REQUEST_DATA_STREAM { target_system : 0, target_component : 0, req_stream_id : 3, req_message_rate : 2, start_stop : 1 }
message from 255: HEARTBEAT { type : 6, autopilot : 8, base_mode : 0, custom_mode : 0, system_status : 0, mavlink_version : 3 }
our sender&receiver example is :
$ python3 examples/sender.py 127.0.0.1:14550 1 0
→ //udp port 14550, sysid = 1, target_system = 0 // (broadcast)
$ python3 examples/receiver.py 127.0.0.1:5760 50
50 = receiver sysid
Then, to route between those:
$ mavlink-routerd -e 127.0.0.1:14550 0.0.0:5760
But, “we don’t route this MAVLink message traffic to Mission Planner using UDP”
For this situation, we need your advices, recommends and supports 
Thanks for your feedbacks already.
Berkay Erol