For those looking for a quick and easy method of creating MAVLink peripherals, I’ve got a working implementation of the pymavlink library working on the RP2040 microcontroller, using Micropython.
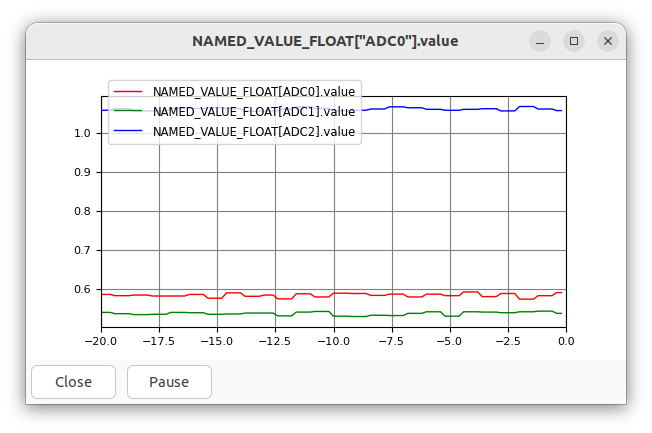
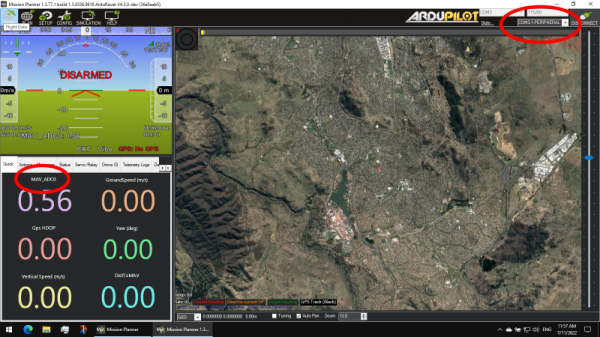
As a useful example, I’ve created a script that reads all the ADC values on a RP2040 and sends the values as NAMED_VALUE_FLOAT MAVLink messages, which can be read (and graphed) by most GCS’s:
MAVProxy:
Mission Planner:
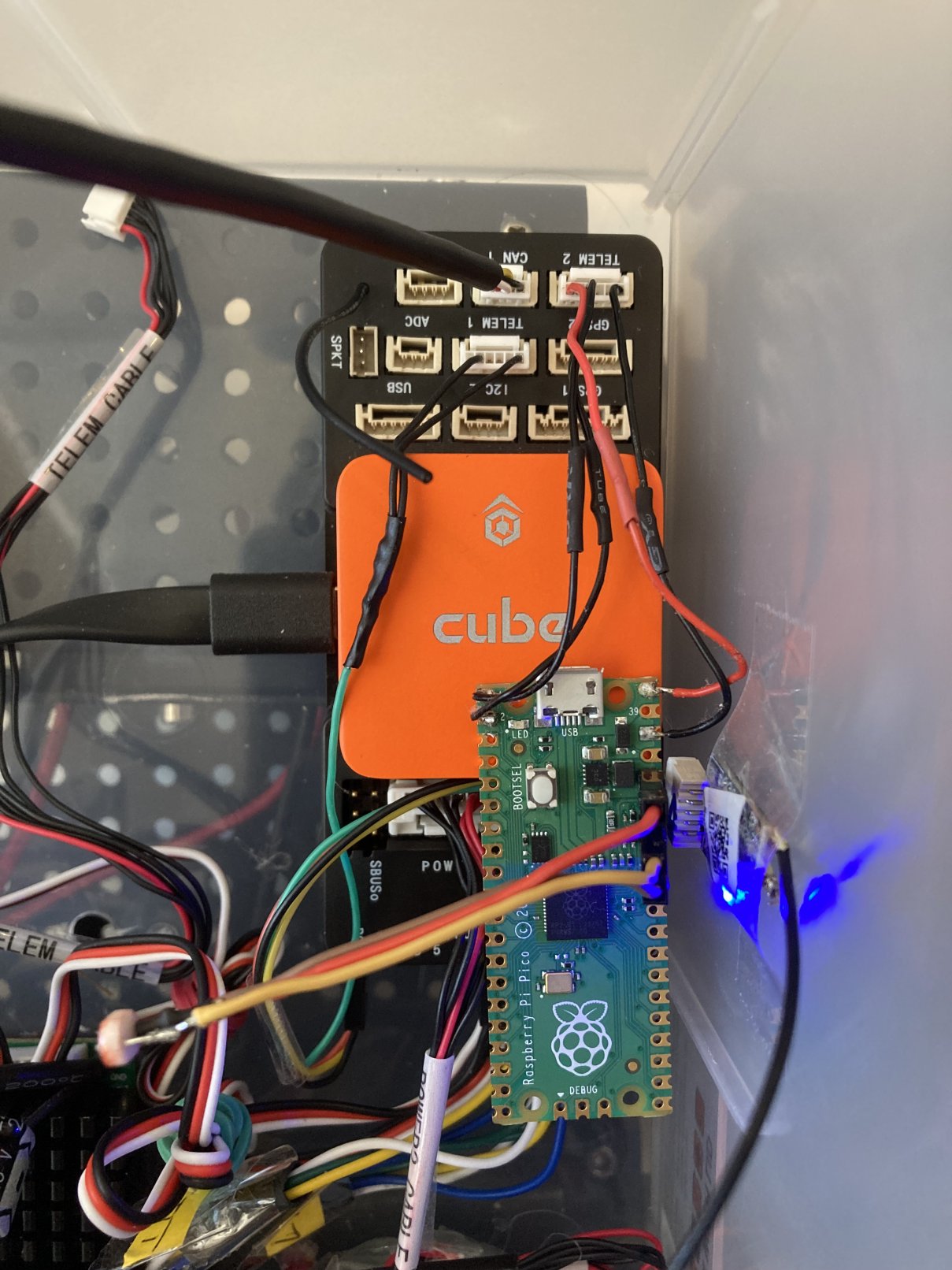
The peripheral itself is connected to a flight controller’s telemetry port, with the SERIALn_PROTOCOL = 2 and SERIALn_BAUD=57600:
Full details and source code are available on GitHub.