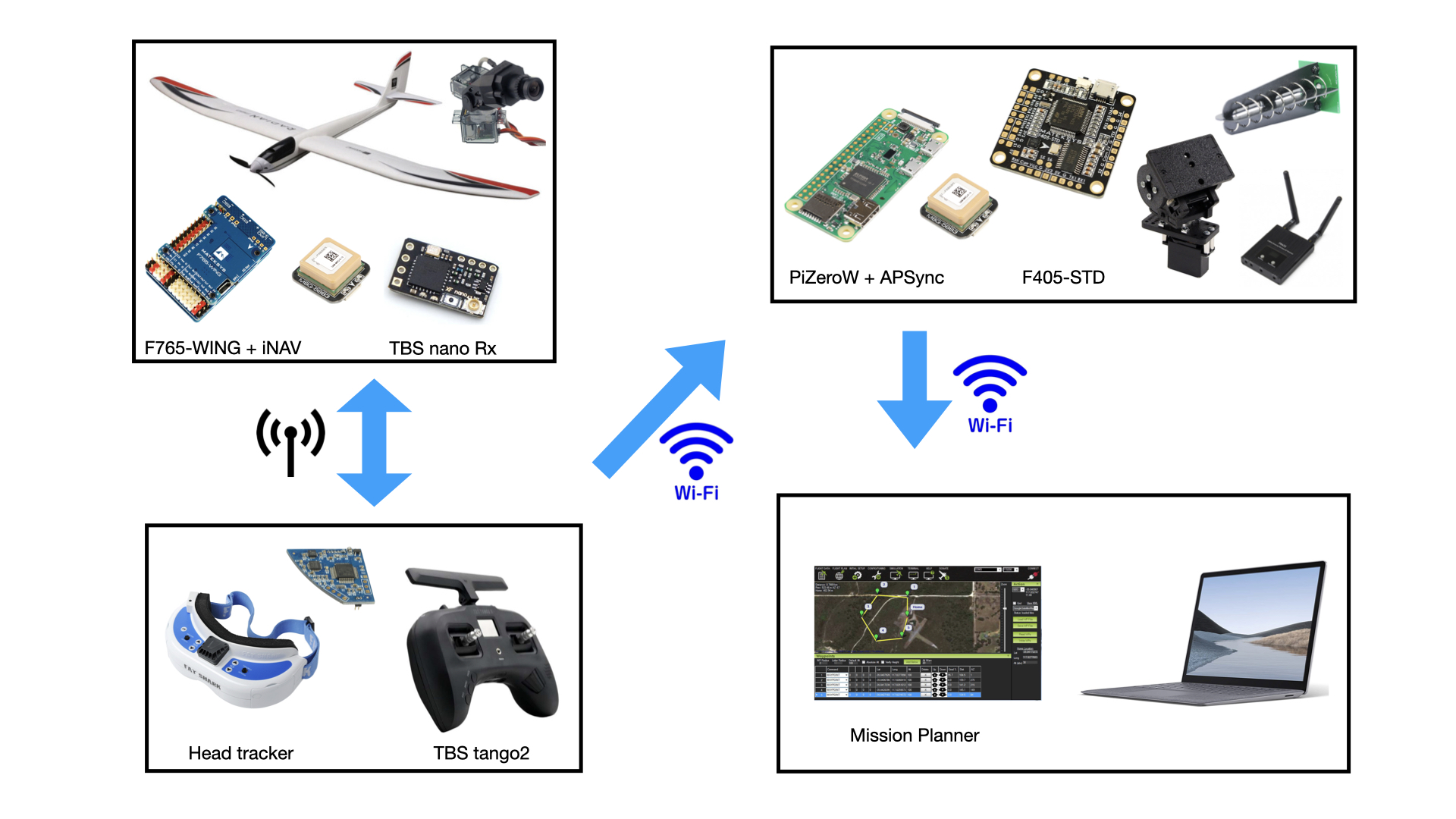
First post, yay! I’ve been struggling setting up my antenna tracker for quite a while now. I have until the end of winter to get it working, so I was trying to figure things on my own, but I’ve reached a point where I need guidance and advices from experienced users. Attached is the setup I’m trying to achieve. It all “works” except I cannot get Mission Planner to connect to both my plane and the tracker at the same time using UDP. If I launch two instances of MP side by side, one with UDP 14550 (tracker) and one with UDP 8888 (Tango2), I see my tracker one one window and my airplane in the other window (Both have GPS lock).
The problem (I think) is that a single instance of MP needs to see both the tracker and the plane to be able to point the tracker in the right direction (it needs something to track). I’m not too sure, but it seems to me that the only way to connect the tracker in MP is to use a USB connection (the usb can be converted to RF too I think).
I was wondering if there is a config file I can modify in APSync on my PiZeroW where the Airplane MAVlink info would be sent to MP in parallel to the tracker info? Or do I need to rethink the design (meaning using the PiZeroW in Access Point mode will not work)?
Is the source of my problem is that fact that the companion computer is receiving the UAV MAVlink information instead of the antenna tracker? If I connect the UART wifi module to TELEM1 port of my F405-STD, will the information be passed to the Mission Planner via the companion computer (connected to the F405-STD on TELEM2 (USART3))? Will Mission Planner be able to make the difference between the MAVlink info coming from the UAV version the one coming from the Tracker?
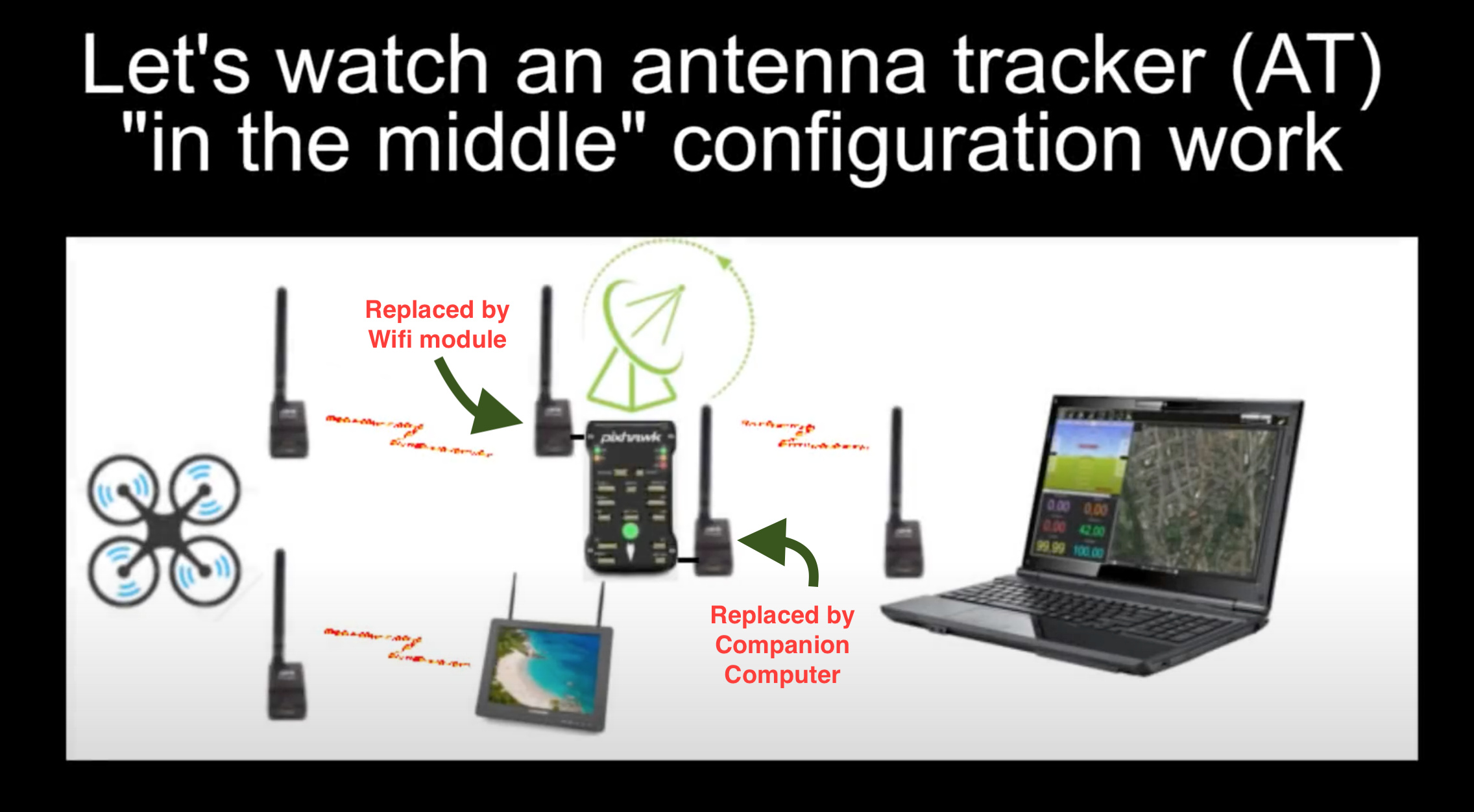
It seems that this is how the “tracker in the middle” configuration works (https://www.youtube.com/watch?v=8GCqYTDYZaM). I’ve took a screen shot of the video and indicated what I think should me modified.
Any one can tell me if what I’m saying makes any sense or if I got this all wrong!?
Yeah, you want to the plane telem link to go via tracker. Just connect both to links to tracker and setup for MAVLink, tracker will auto forward to the GCS. Just need to be sure the tracker -> PC link has enough bandwidth for tracker and the plane (Wifi is great for this).
I received my ESP8266 module today. It took me a while, but I figured out how to flash the MAVESP8266 firmware using an Arduino UNO.
I’m not too sure how both the ESP module and the tracker should be set to get both plane and the tracker show up in Mission planner. Here’s how I’m connected right now:
Airplane (Crossfire telemetry) -> Tango2 (MAVlink over wifi connected to the ESP AP; UDP:8888) -> ESP8266 (AP mode) -> F405-STD (UsART3 or Telemetry 1) -> PiZeroW (running APSync; UART4 or telemetry 2) -> GCS (connected to the APsync via wifi; UDP: 14550)
It seems that I need to change a setting somewhere to get the plane info passed to the GCS. You mentioned that the tracker will auto forward the info. Do I need to configure the tracker in a special way for this? Do I need to configure MAVESP8266 in a special way? I think the ESP setup is likely to be the problem. I must need to tell it that it has to listen to UDP: 8888 somehow?