Hello,
I am trying to feed position data from an external source to the Autopilot with the GPS_INPUT message. The message is built and sent correctly and all data can be seen in the GPS logged onboard message.
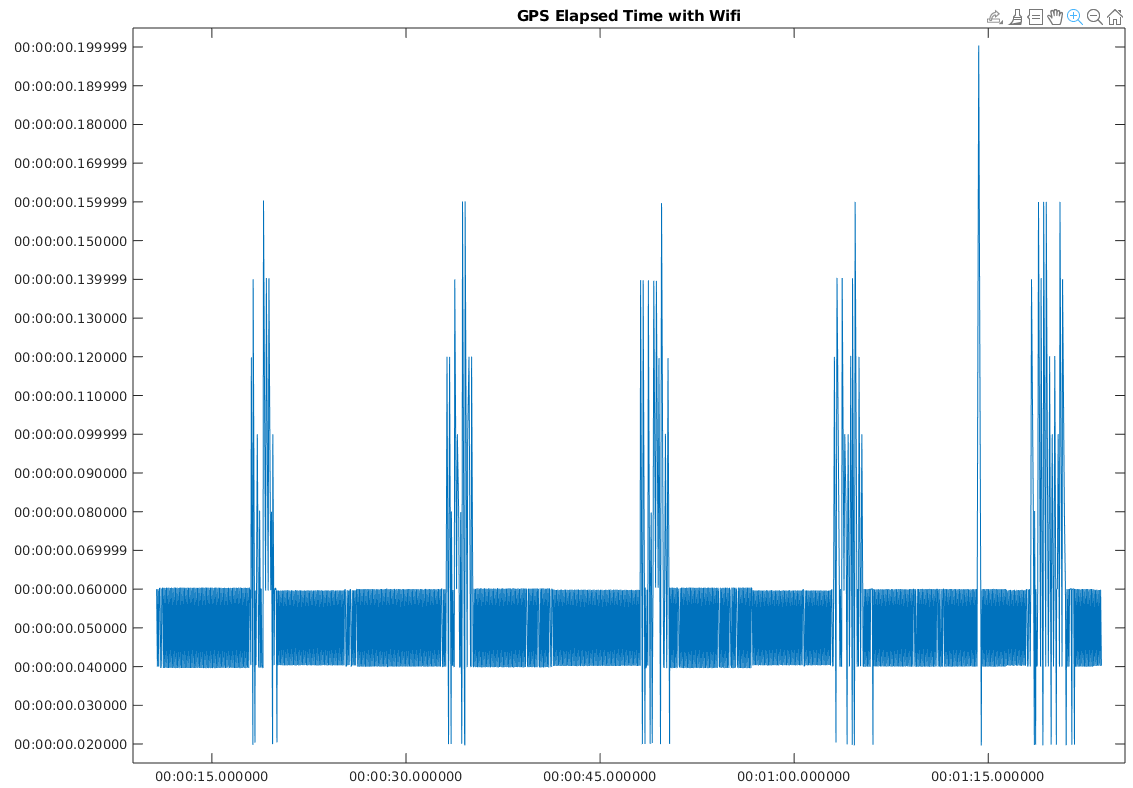
The problem is that even though I send the message at 20 Hz this is received at non-regular intervals and certainly not equal to 50 msec. See photo below. To derive the intervals I differentiate the “GPS.timestamp” field.
Some info:
- I use wifi telemetry ESP8266 wifi telemetry — Copter documentation with 921600 baudrate.
- the GPS_INPUT message is 75 Bytes long.
What could cause this behavior? And perhaps, any advice on how to debug this?
Flight log: 20.bin - Google Drive
Tlog: flight.tlog - Google Drive
EDIT
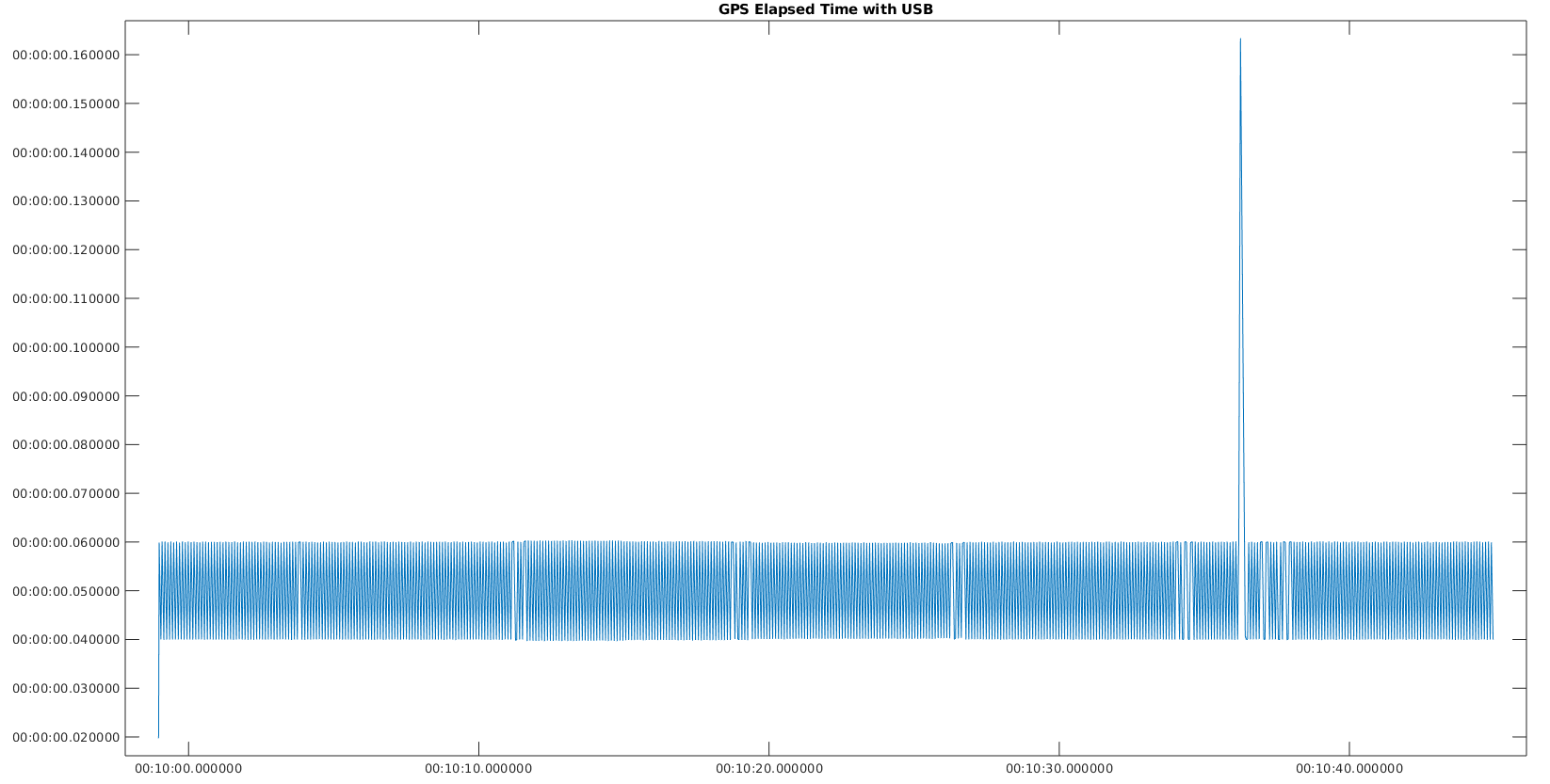
Using USB instead of wifi, the elapsed time seems a lot more stable which indicates some bottleneck on the bandwidth. That is a bit strange though since the GPS_INPUT traffic is 20*75 = 1500 Bytes/sec and should be handled by the 921600 baudrate of the wifi. However even with USB it can be seen that there are big delays now and then.