Mavlink 3D-Map
This tool receives navigation information via MAVLINK, and display vehicles in 3D environment using three.js .

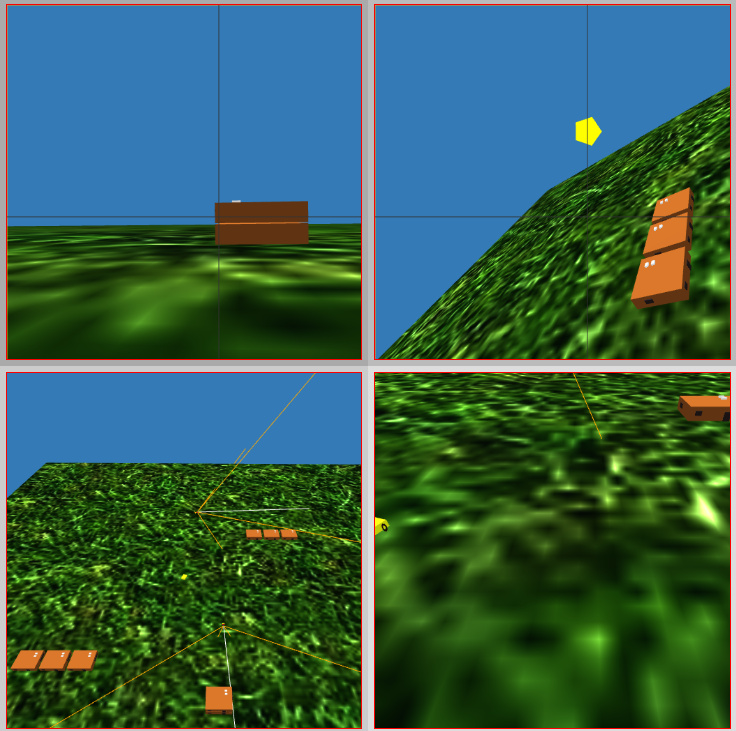
The tool can display multiple view ports, each one has a world camera besides all cameras attached to vehicles. so you can monitor from multiple views at the same time.
Feature
- Reads vehicle location and orientation via mavlink.
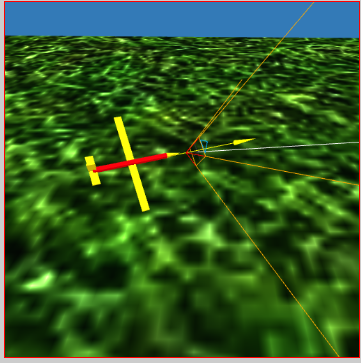
- Display vehicles in 3D Map.
- Add cameras to vehicles and allows fpv:
P & O buttons used to switch between cameras. If there is SITL connected to the map then it will have its own camera and you can switch to it using P & W. then you can control it using W, S , A , D. You can press R to reset camera orientation. - Real Maps can be displayed as well instead of artificial environments.
App Structure
The application has two parts:
- Website that runs and uses websockets.
- UDP2WebSocket this is a nodejs app that receives udp packets from SITL and send equivelant data via websocket to Website.
Example
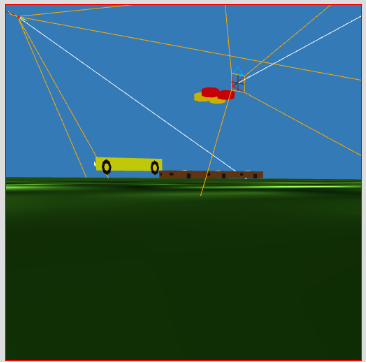
Running two vehicles “Quad & Plane”
Plane
python3 ~/TDisk/out_gits/ardupilot/Tools/autotest/sim_vehicle.py -j4 -v ArduPlane -M --map --console --instance 80 --out=udpout:127.0.0.1:14550 --out=udpout:127.0.0.1:16450
Quad
python3 ~/TDisk/out_gits/ardupilot/Tools/autotest/sim_vehicle.py -j4 -v ArduCopter -M --map --console --instance 70 --out=udpout:127.0.0.1:16450 --out=udpout:127.0.0.1:14450 --add-param-file=./quadPlus_2.parm
quadPlaus_2.param is a parameter file that specifies ID of the vehicle so that the system knows it is another vehicle.
QuadPlus_2.param
SYSID_THISMAV 2
FRAME_CLASS 1.000000
FRAME_TYPE 0.000000
instance specified to run SITL on different ports.
Drone:
Now run websocket:
node udp2websocket.js
Run Website
cd static
http-server -c0
http://127.0.0.1:9080/index_4w.html
or
http://127.0.0.1:9080/index_4wRealMap.html
for VTOL you can add
http://127.0.0.1:9080/index_4w.html?vtol
http://127.0.0.1:9080/index_4w.html?vtol
That is all … you should be able to see vehicles.
You can define your own extra environment robots and objects.
You can also fly in different places by adding location for example:
http://127.0.0.1:9080/index_4w3dReal.html?lng=31.1339&lat=29.9764
Have fun !