Hello!
I build QGroundControl from master, and I saw in QGC code realization of MAV_CMD_CAMERA_TRACK_POINT command.
For communicating with QGC I used mavlink-camera-manager
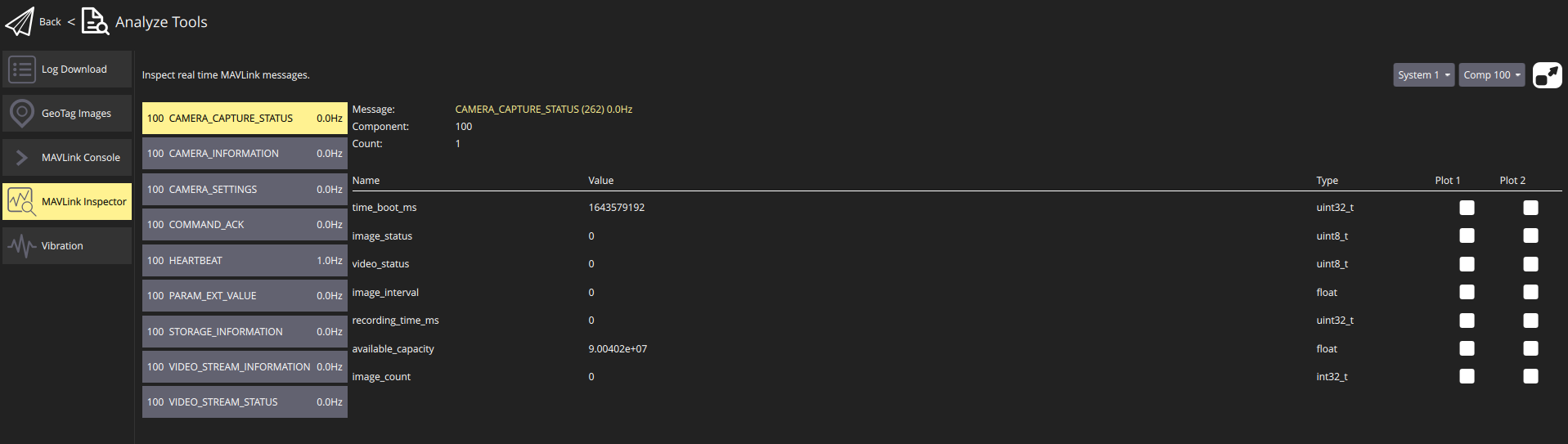
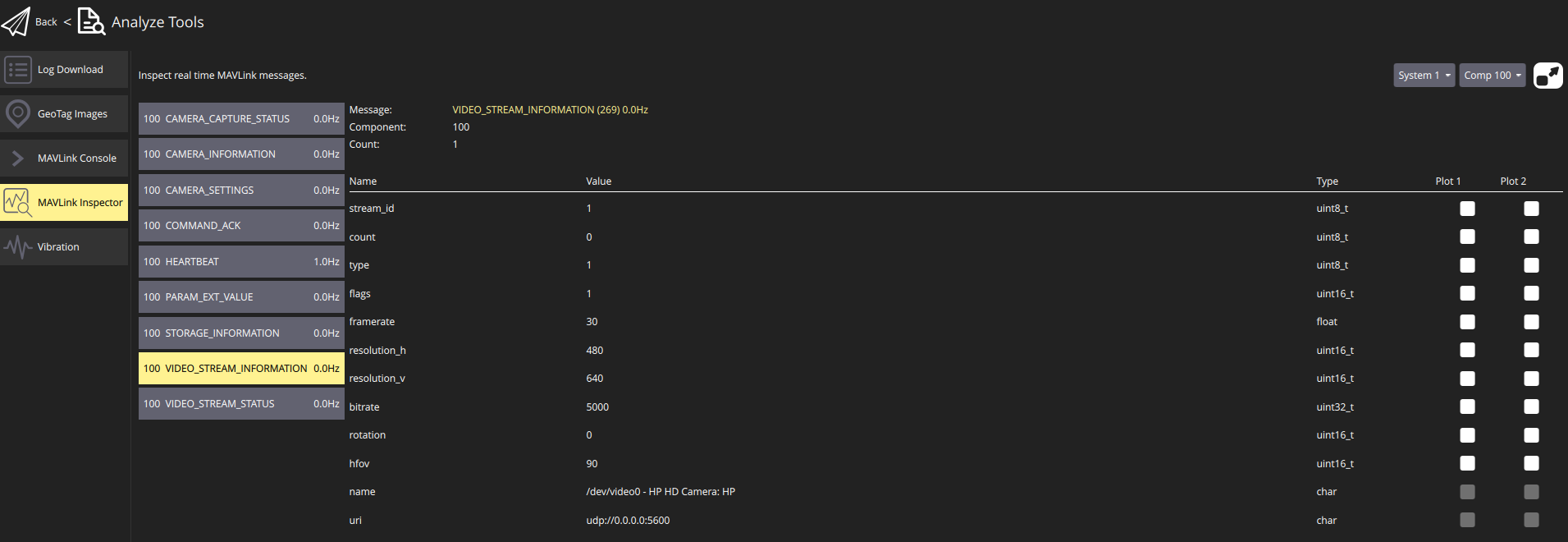
I had to update its code a bit and now mavlink-camera-manager can send information about my laptop camera by mavlink and QGC automatically connect to video stream using information from VIDEO_STREAM_INFORMATION(269) with uri = udp://0.0.0.0:5600,
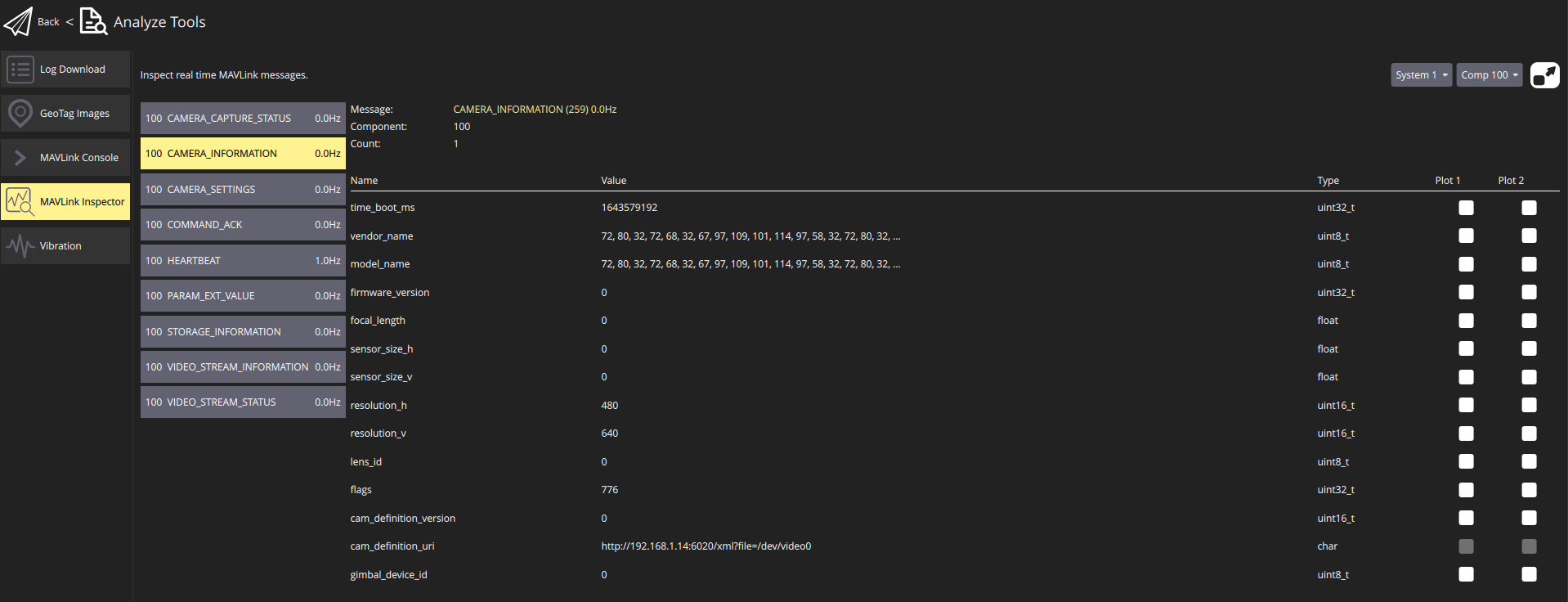
also I was able to send CAMERA_INFORMATION(259) command with flags = 776 and valid cam_definition_uri.
Doth MAV_CMD_CAMERA_TRACK_POINT command already implemented in QGC and what I need to do for sending this command by mavlink using QGC?
QGC_logs.txt (22.6 KB)
Use QGC master and ArduCopter 4.5.0-beta4
Thank you very much for your answer!
I found only Copter-4.5
So I build it and launch it by this command:
sim_vehicle.py -v ArduCopter -f copter --console --map --out “tcpin:0.0.0.0:5777”
I’m still don’t see how I can send MAV_CMD_CAMERA_TRACK_POINT command using QGC.
Could you please explain what i doing wrong?