Hello,
I got a problem with the Matek F405 Wing.
If only one Lipo battery is connected, no telemetry is transmitted.
I start the FC by connecting USB (notebook mission planner) and then connect the battery to the telemetry connection. (also without USB)
I already tried different UARTS and another receiver.
the same receiver with the same level converter works right away on an old Pixhawk.
Except for the “starting difficulties” the FC works flawlessly.
RC: Xlite with R9MM+ with Flex firmware
Andruplane stable-3.9.8
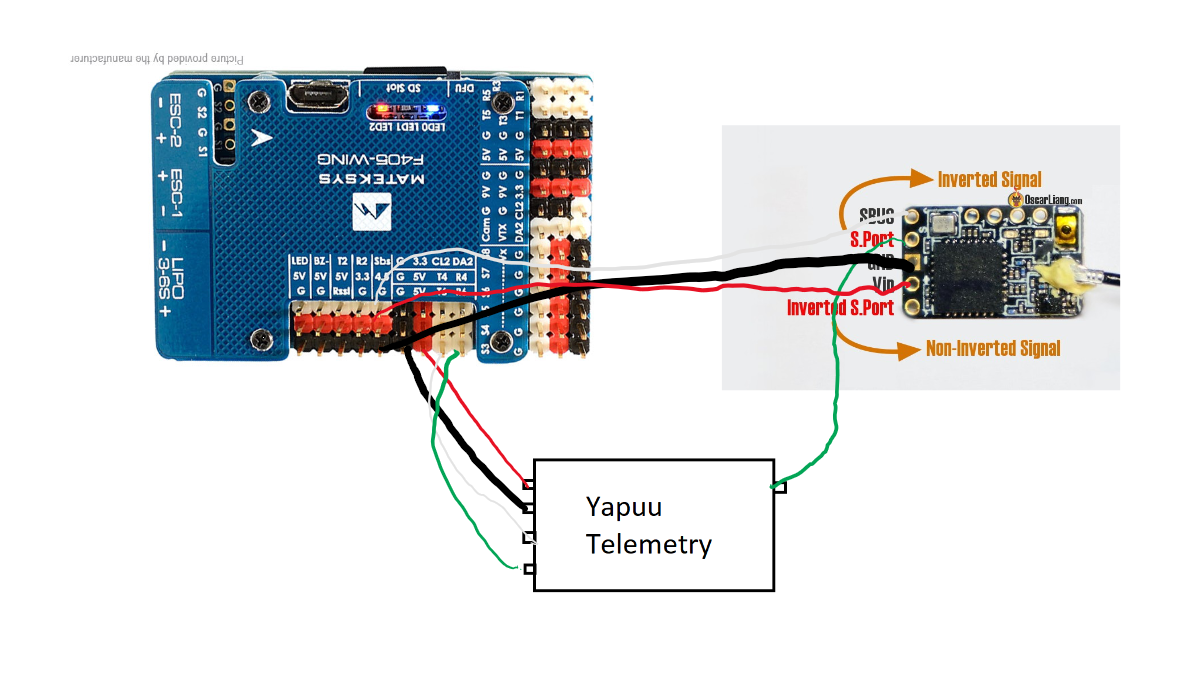
I use the UART Option 10 and the Yapuu telemetry cable.
From your description, I am not sure exactly how everything is connected…but a couple of notes…
When only USB is connected to the FC, all the uart and i2c signal outputs are active, but none of the 5V outputs are active so UART and Compass, etc wont be working…and if you subsequently apply main battery to the FC, then the compass of the BN-880 will fail to start up since its signal lines are toggling, when it was not powered…but the BN-880’s GPS does not have a problem with the TX/RX lines wiggling before the main power to the GPS is turned on, so it will start up fine…
I assume you are using an inverter cable between the UART and the RX to obtain an SPort connection…in that case the MAX2323 inverter in the cable can “latch-up” and not only not work, but get very hot, if you power via USB and then apply main lipo to the FC…again because the UART outputs are wiggling before power is applied to the inverter from the FC’s 5V source derived exclusively from the main LIPO, not when USB powered only…
Powering up via the main battery first, then attaching USB will allow everything to work…ie Compass and FRSKY Sport inverter cable…
but I am just guessing because you havent provided exact connection information…
Thanks for your answer.
But that’s only half true.
UART2 (RX) already gets power when only USB is connected. (The transmitter already has a link)
UART6 (telemetry) seems to have nothing yet
UART3 (GPS has no power)
Compass and other I2C devices I had not yet connected to the FC. I can’t say anything about that yet.
I don’t know if there is a MAX 232 in the cable, but I suspect it is.
No, it’s the other way around. I have to connect USB first and then the battery, then I can remove USB again.
Should I install a 6V capacitor on the inverter cable?
the power in the SBUS row is not 5V… its 4.5V , the one below RX2 is 3.3V,and both are derived from either USB or 5V regulator, neither is the 5V derived from VBAT and labelled elsewhere on the board…
you mention “only one LIPO”…how many are used and how are they connected? if you give a complete connection description/diagram, we may be able to help more…
if the FC and inverter cable are powered, everything cabled correctly, and FC params correct, the only way you are not getting telem to the RX is if the inverter cable is latched up…
and if you have the FC running before you attach the LIPO (USB or otherwise), the compass, when attached, will not function depending on chip and circuit layout used…
Don_Sebastian, I don’t think you need the telemetry cable. Check the Matek website diagrams. The diagram shows S.Port going to TX2. UART2 has a built in inverter.
AFAIK, on UART2, you usually connect the receiver (4,5 = VCC, G = Ground, Sbs = SBus). I have never tried connecting my S.Port cable to UART2 and somehow doubt that it would work.
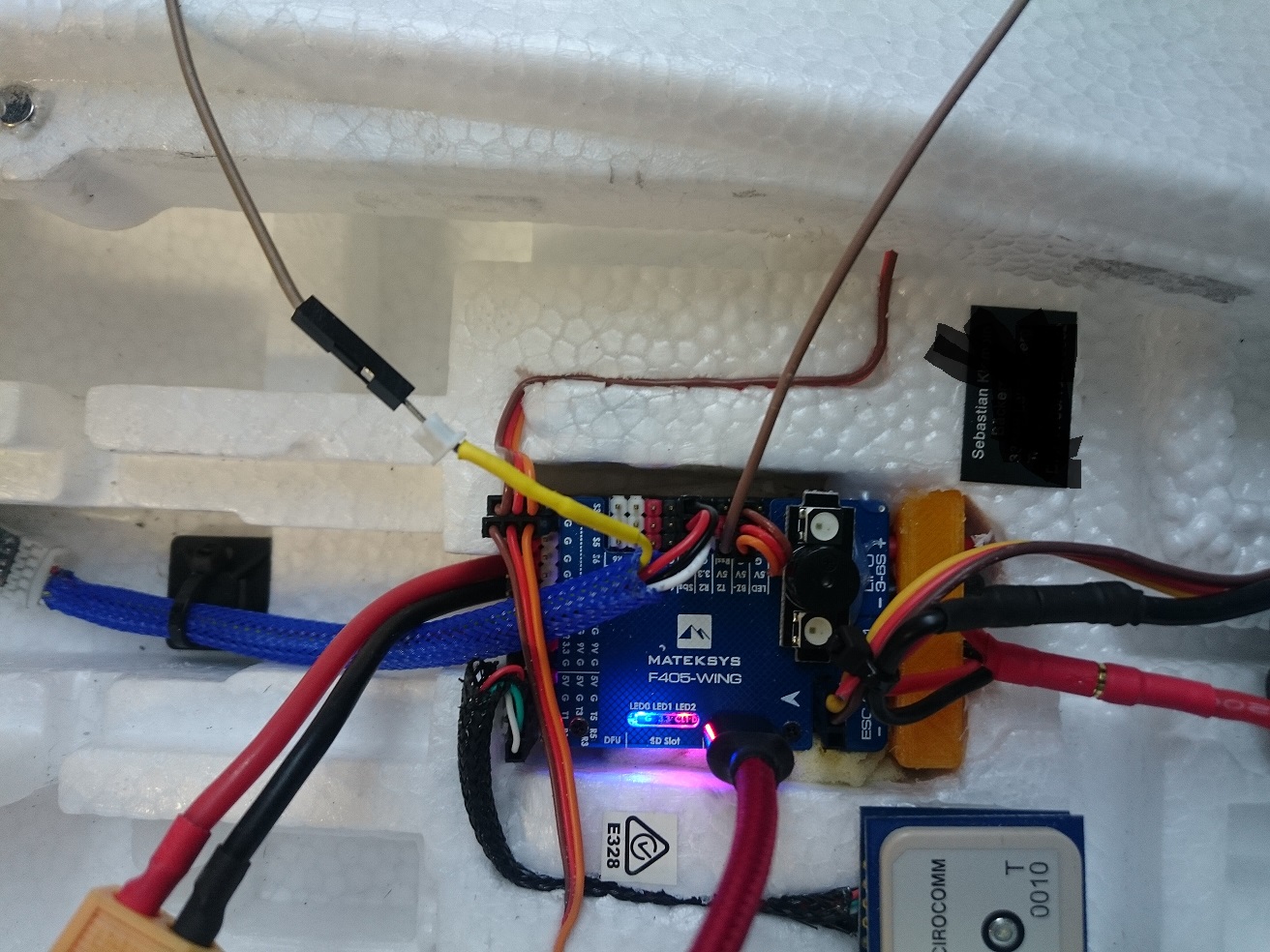
What definitely works for me is connecting a single wire, without an inverter or anything else, directly from the “Inverted S.Port” pin of the R9MM to R5 near the blue LED of the F405-Wing. The “Inverted S.Port” pin is the corner pin that is furthest away from the four pins where you would directly connect four servos to the R9MM if you wanted to (usually you don’t). You can see the “Inverted S.Port” pin on the image that you have posted. On the backside of the F405-Wing pins, between R5 and the directly adjacent T5, I have soldered a standard 1N4007 diode, with its cathode (the ring) connected to T5.
For the setup in ArduPlane, all that needs to be done is to set SERIAL5_PROTOCOL to 10. Baud rate is set automatically to 57k. The Yaapu script will then display telemetry shortly after the system is powered up and the receiver binds to the Taranis. You can also set SERIAL5_PROTOCOL to 4 and do a manual sensor search in the model’s telemetry screen, but in that case the Yaapu script won’t work and you will have to set up your own telemetry screen or script.
Most likely any of the other free UARTS would work just the same.
So yes, for the price it can be built by yourself, like a 100 times.
Where are you seeing the telemetry? Have you installed the Yaapu script correctly, in OpenTX on the Taranis? I’m asking because it’s possible to confuse the telemetry in Mission Planner with the telemetry in OpenTX. The first is being sent via MAVLink through your USB cable to your computer/Mission Planner, the latter by radio waves from the R9MM to the Taranis/R9M via FrSky telemetry protocol.
If you indeed have telemetry running on the Taranis via Yaapu script after you power up with USB and then connect the LiPo, then please have a look here:
Thanks, the tip with the bootloader. it was the solution.
Now everything runs correctly.
I have understood your detailed instructions but will leave the hike in anyway, because I would have to solder the plug on the receiver to go to the non inverted pin.
the 2g weights do not interfere.