paulfa
March 9, 2021, 6:43pm
1
greetings …
F80 t-motors
watching the log data for rc control yaw (channel 4) so it’s normal, i mean the controller is not receiving an order to change the yaw …
YawErr in the log file is giving me some higher values around in some areas.
also you can notice the GyrZ to see the yaw movements (or twitches) …
what can be the problem !
this is a .bin log file , it’s a 25 seconds flight, at 13:44:57s a huge 360 degree turn ! (200ms to accomplish it !) :
Shared with Dropbox
this one is the parameters file :
Shared with Dropbox
thanks in advance.
paulfa
March 10, 2021, 1:55pm
2
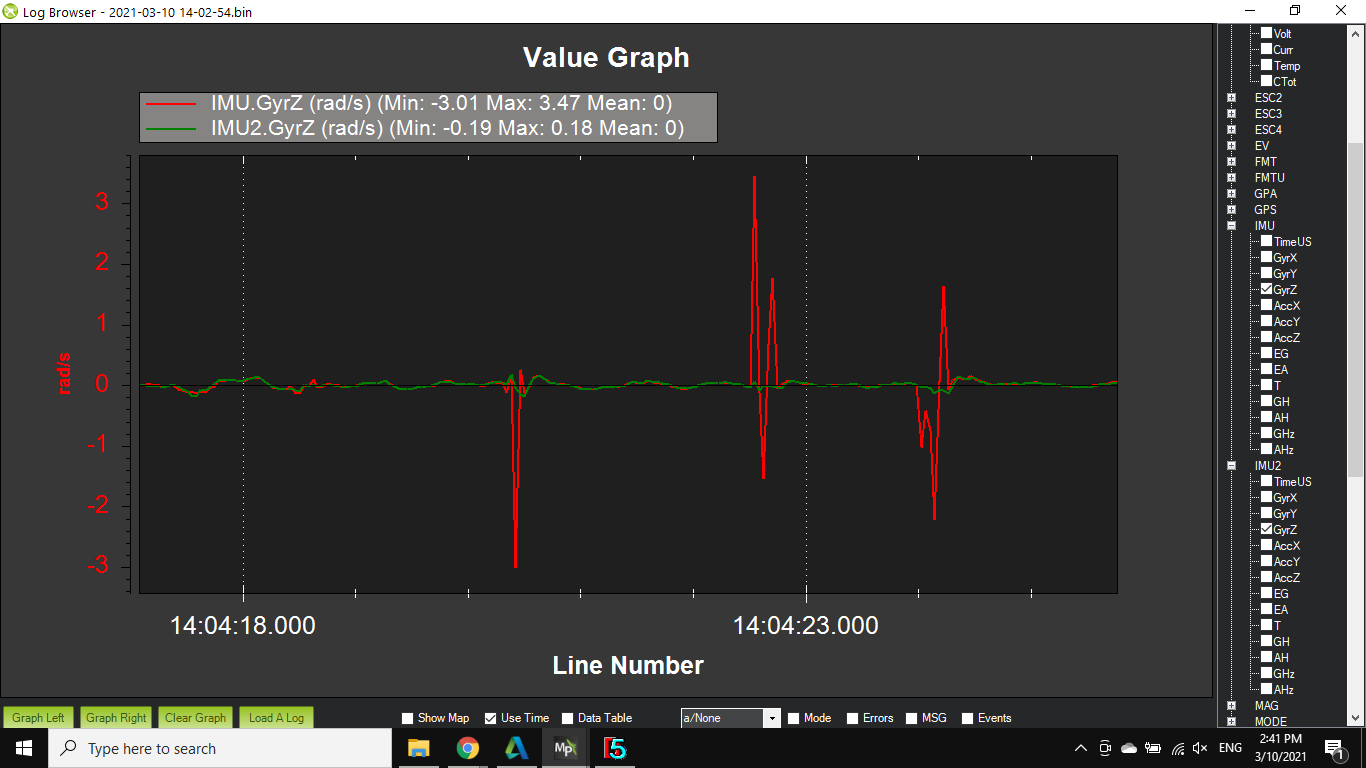
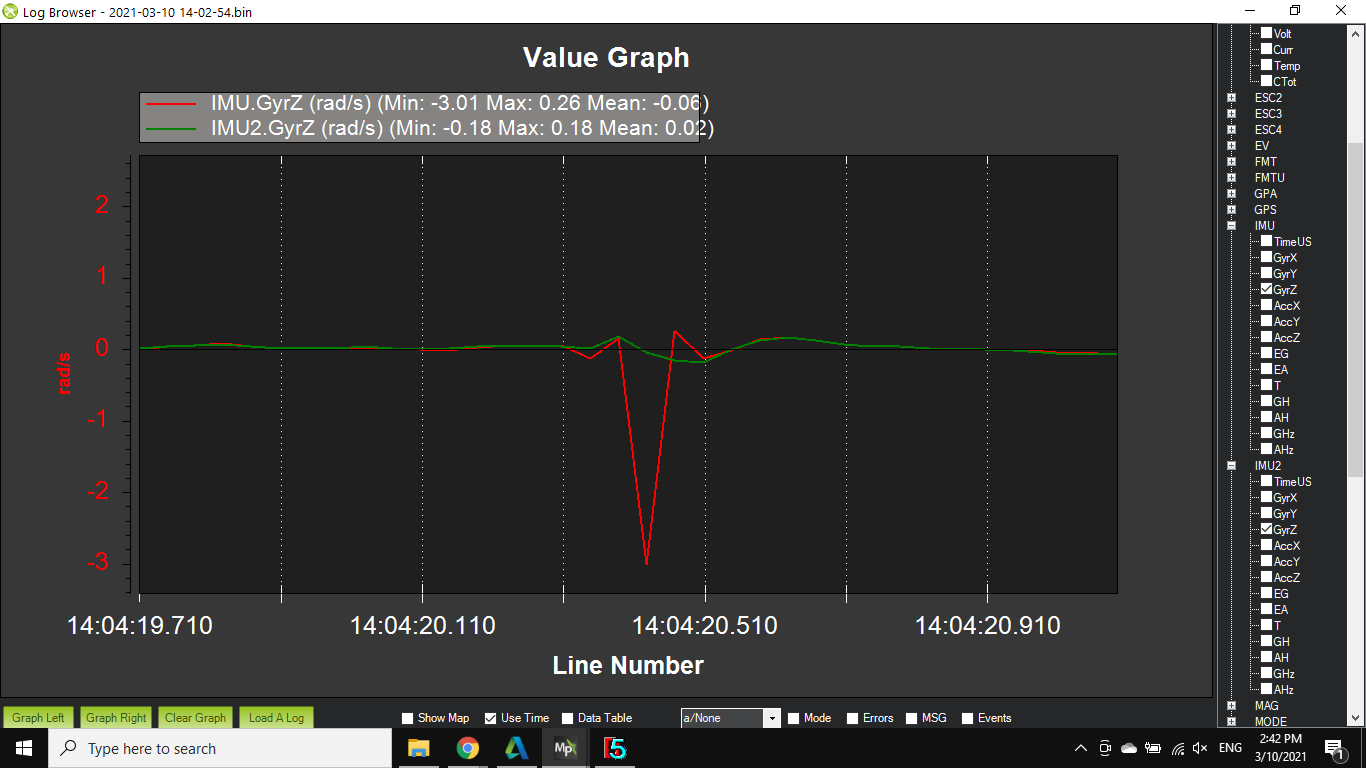
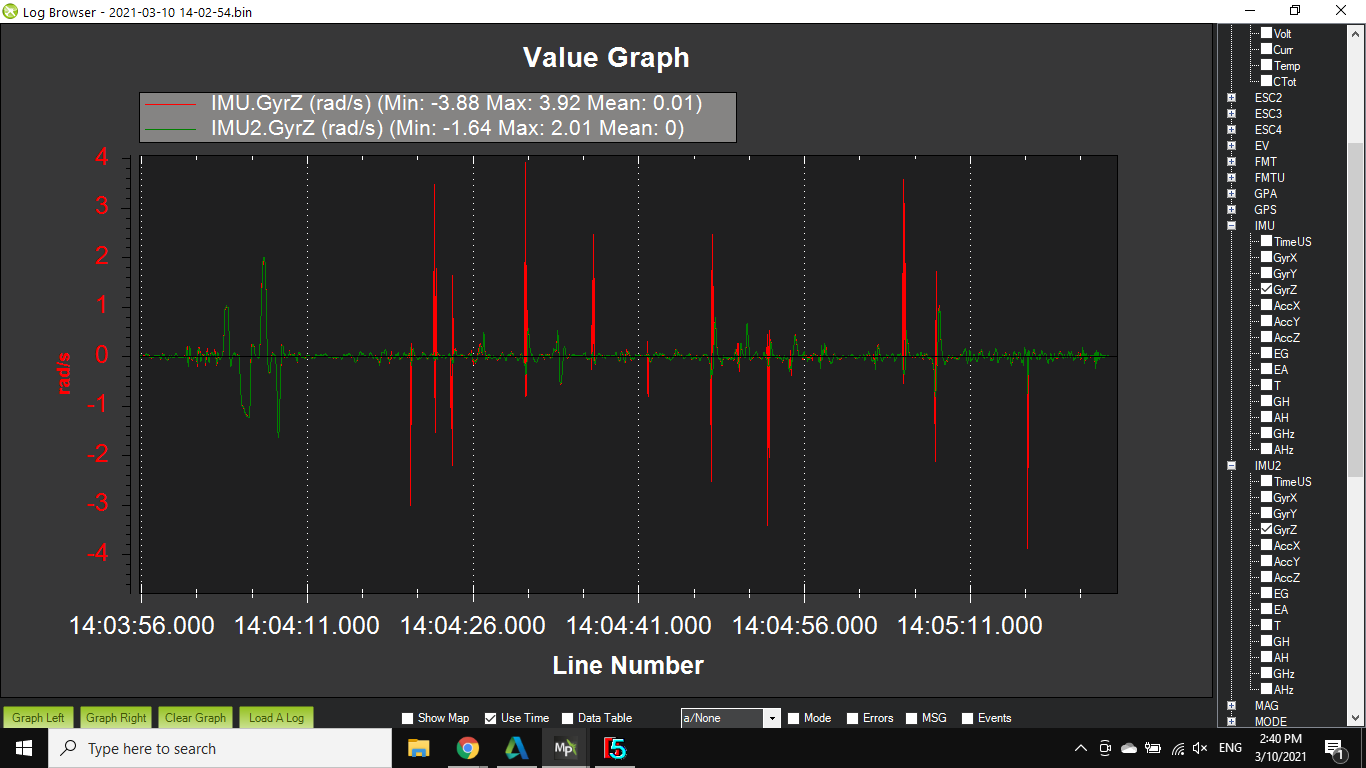
today i checked the imu1 data (GyrZ) Vs imu2 data (Gyrz) :
i found that the imu1 measurements are glitching ! (check attached)
so i set the INS_USE to “zero” to use only the second imu or (imu2)
everything worked fine : now what is causing the first imu to do so ?!
imu|690x387
dkemxr
March 10, 2021, 2:12pm
3
Perhaps this is being addressed but it may not be the problem you are seeing.
ArduPilot:master ← tridge:monitor-20602
opened 04:03AM - 11 Feb 21 UTC
ArduPilot:Copter-4.0 ← amilcarlucas:pr-backport-monitor-20602
opened 08:31AM - 10 Mar 21 UTC
1 Like
Giorgio_P
August 10, 2022, 10:41am
4
Hello,
IMU0 and IMU1 AccY ( same issue on X)
paulfa
August 21, 2022, 7:55pm
5
kindly check this link
i fly my little babe at home, so no gps … and look at the section between 3:00min and 4:00min (i’ve got a stable flight)
i tested the arducopter 4.2.2 but the problem is still the same !
the problem is with IMU0, compare Grz1 to Grz0 and see …
i think it’s a IMU0 driver related issue.
cheers.

{kind=link}