Hi,
I built a quadcopter that was working very well until I recently started it up for the first time in a while. Suddenly a bunch of Yaw instability appeared. When flying normally or just hovering the quadcopter would randomly Yaw and if it was stabilising out of a pitch/roll then it would also have a massive yaw flip out. I thought it was tuned incorrectly, however, the quadcopter was working before and I also ran autotune which gave similar PID’s as before so I’m not sure whether this is the issue.
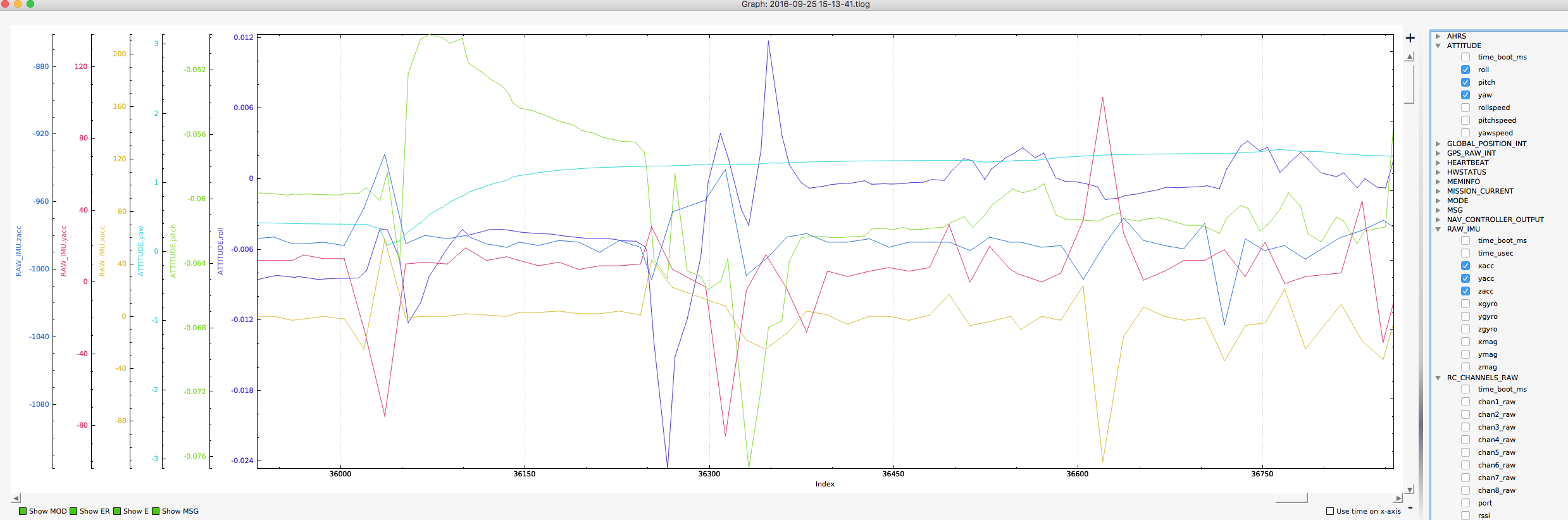
Then today I took it out and it just went crazy. I’ll attach the logs and they are really worth taking a look at. The throttle in was jumping up to 2000, then dropping below 900 every second. I have no idea why this is, but naturally, it ended up in a massive crash that has busted my quadcopter badly.
If anyone can help, that would be very much appreciated.
Thanks in advance,
Boris
2016-09-25 15-13-41.tlog (1.5 MB)
2016-09-25 14-53-31.bin (105.2 KB)