Karthik,
Awesome, looking forward to the PR, we can include that in the next release candidate.
Karthik,
Awesome, looking forward to the PR, we can include that in the next release candidate.
Yep! But I am facing problems with EKF2 and EK3 now. With EKF2 enabled, i get a lock in 10-15 seconds but on EKF3, I never get a lock even after waiting for a long time. Will upload logs here!
But any idea why this could be the case? or anyone else reported this?
Hi Karthik,
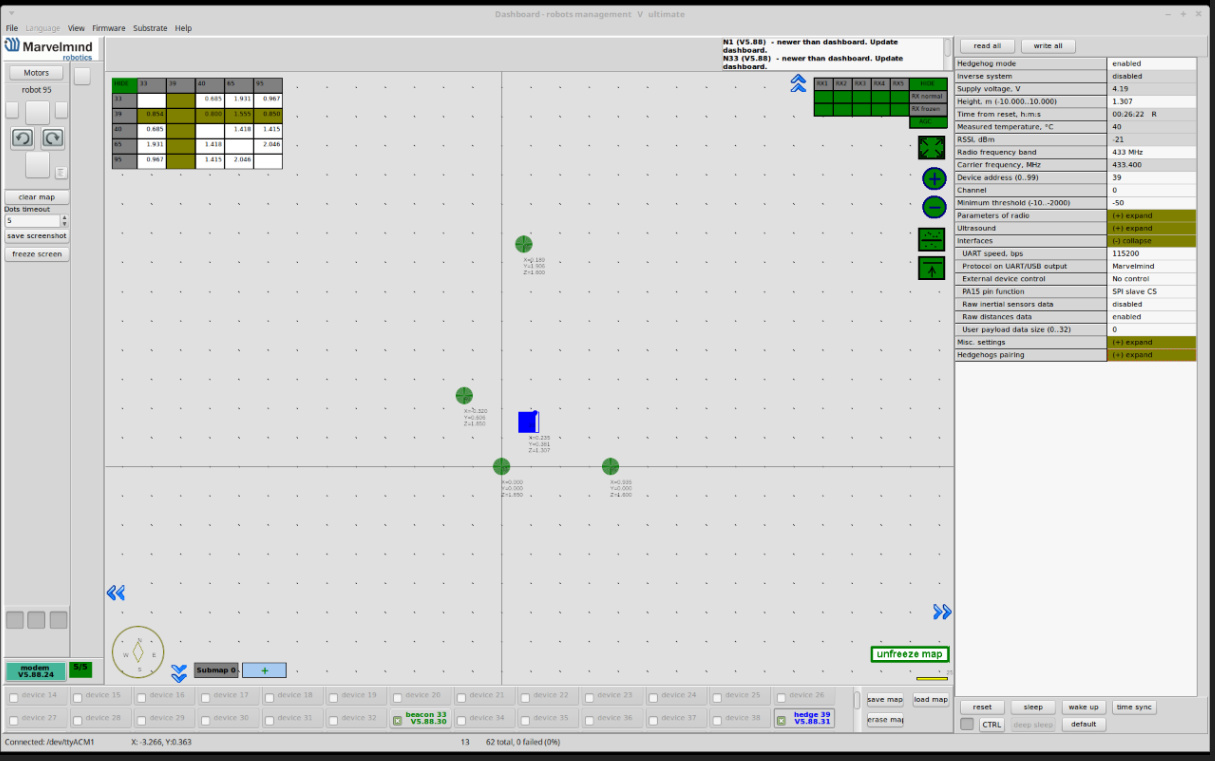
I have enabled the “raw distances data” on my hedge but the rover position does not appear on the planner. I did see some d0, d1, d2 values though (I am using only three stationary beacons). What do these d values refer to?
@rmackay9 I have tried following the wiki page but to no avail but thanks 
I tried to move the hedge around and the d values changed so I guess I did successfully receive mm messages but the position of the hedge does not appear on the planner. I have included the link for the latest log file below:
https://drive.google.com/open?id=1GDmj_49vqs7DoDnE6kGJ0f8iL3QxIFFB
Hi,
I have been wondering where does the rover get the heading from? The internal compass or from the beacon or the average of both.
In the wiki page, about setting the BCN_ORIENT_YAW value, if I have 3 stationary beacons, which is the second? Or any other beacon other than the one on the origin would be fine.
Okay so D0, D1, and D2 are the distances from the beacon to the rover itself. Ideally the EKF should triangulate the rover’s position using this
Sorry for the delay but i hope to come up with a PR by the end of the day which fixes how the raw distance is fed into the EKF.
Can you post a screenshot of your dashboard from MM? and which MM HW set do you have? 4.5 or the 4.9? i am having problems that my MM doesn’t consistently inject the coordinates at the defined frequency
Ideally your lowest device ID beacon should be your origin and next highest device ID is your 2nd beacon and so on
I am going to be testing more with this today.
But i am having compass issues the copter jumps all over the place!
I think there are two things that could cause the marvelmind stuff to not work on a Rover even though it does work on Copter:
I’m not sure which it is but I’ll try and have a look in a couple of days. I’ve got an event that stops me from doing it faster than that I’m afraid. Thank for the report!
Thanks Randy. I hope to push in the code by today. Sorry for the delay.
I am trying to emulate the MM on rover SITL as close as possible to speed the tests up! Hope to see some some positive results! ^^
Hi,
I have managed to get the position of the rover to work but the message “Bad AHRS” keeps appearing and the message “EKF3 IMU0 stopped aiding” then soon after the position of the rover return to 0 for both long and lat.
Is there a way to disable the bad AHRS?
Here’s the log file:
Here’s my parameters list:
beacon_ek3_working.param (10.8 KB)
Hi Mien,
can you try with this https://github.com/ArduPilot/ardupilot/pull/8457 ?
This contains a couple of bugfixes and should ideally stablize the EKF3 fingers crossed
Hi Karthik,
I have tried the new fix but the behaviour is really erratic, the “BAD AHRS” message appears sometimes while it works fine some other times. I did not change any parameters and was using the same set up the whole time. All I did was reboot the autopilot (in my case erle brain).
The log files of the “BAD AHRS”:
https://drive.google.com/open?id=1g_jBtos-YMq7g5okyLB2LyRHgqW38G6n
https://drive.google.com/open?id=1PY4vTr_WBlacbHUsHhPTeQYTq1DwBEZd
The logs files that are good:
https://drive.google.com/open?id=1U9zhR5NJ0KJWtda9JZfVWrgONaAr6JLF
https://drive.google.com/open?id=1igSIxnniROMoIiQPUKgQeH59CRKGvsy4
Hi Mien,
Thank you for the test. It is exactly the same with me!
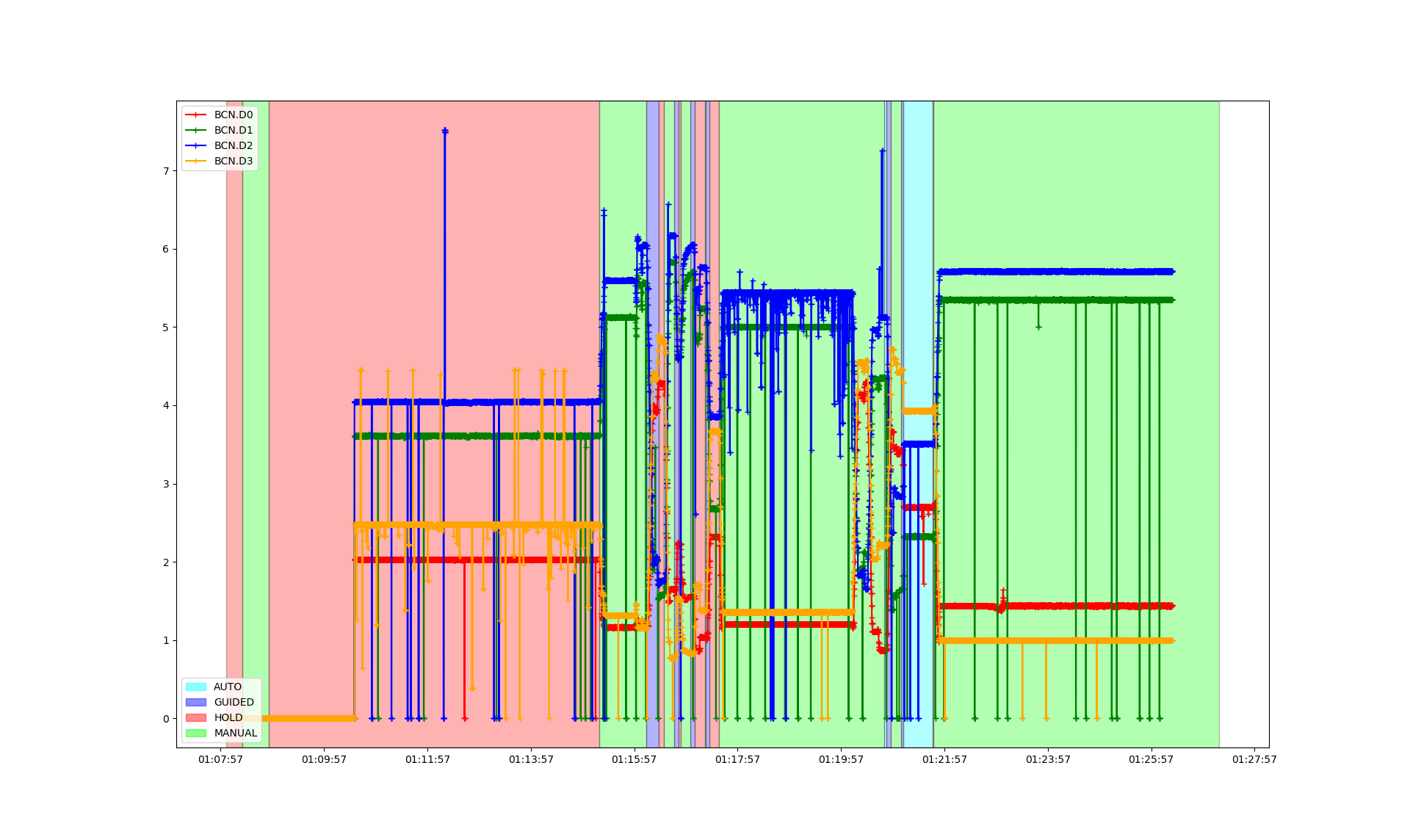
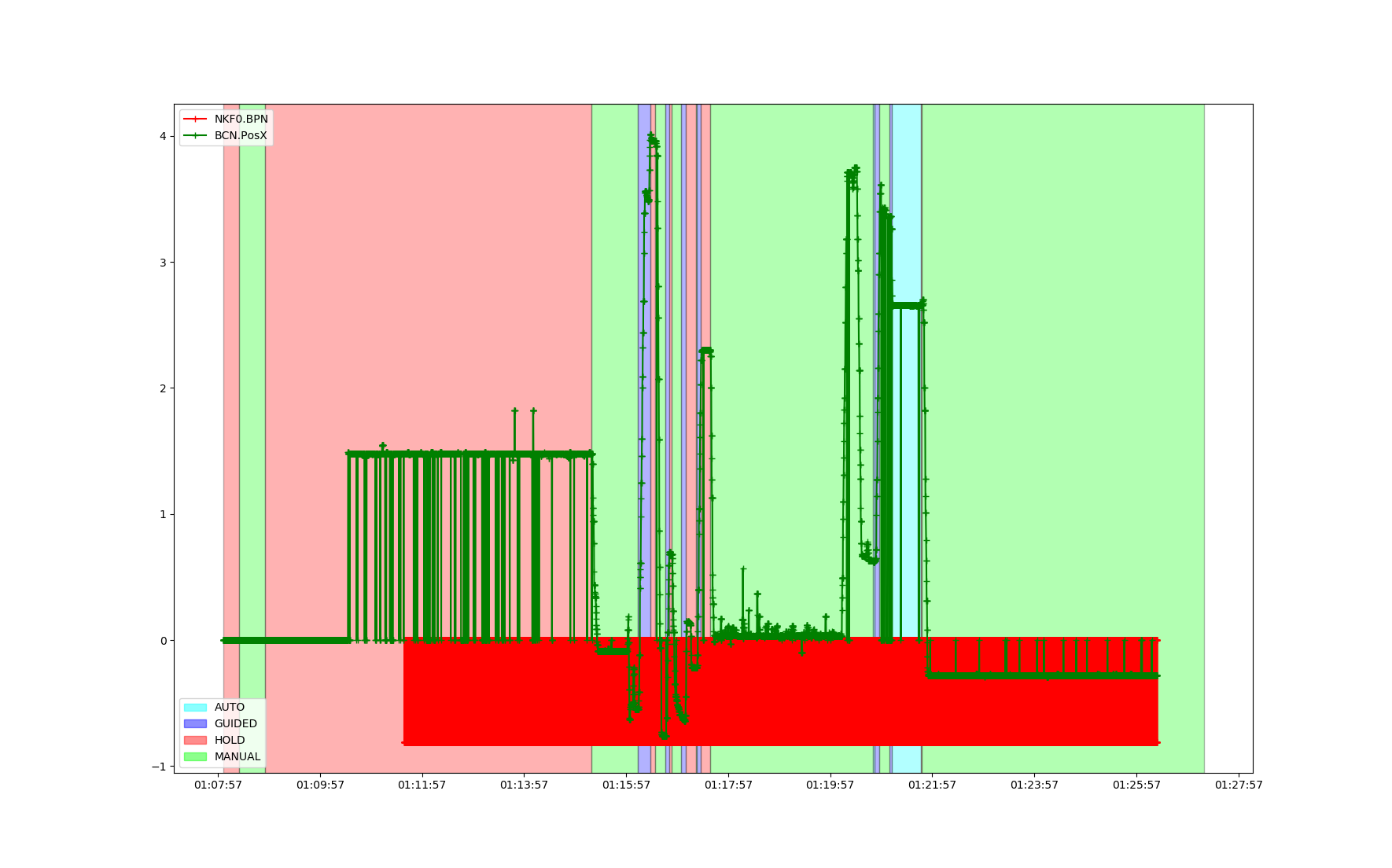
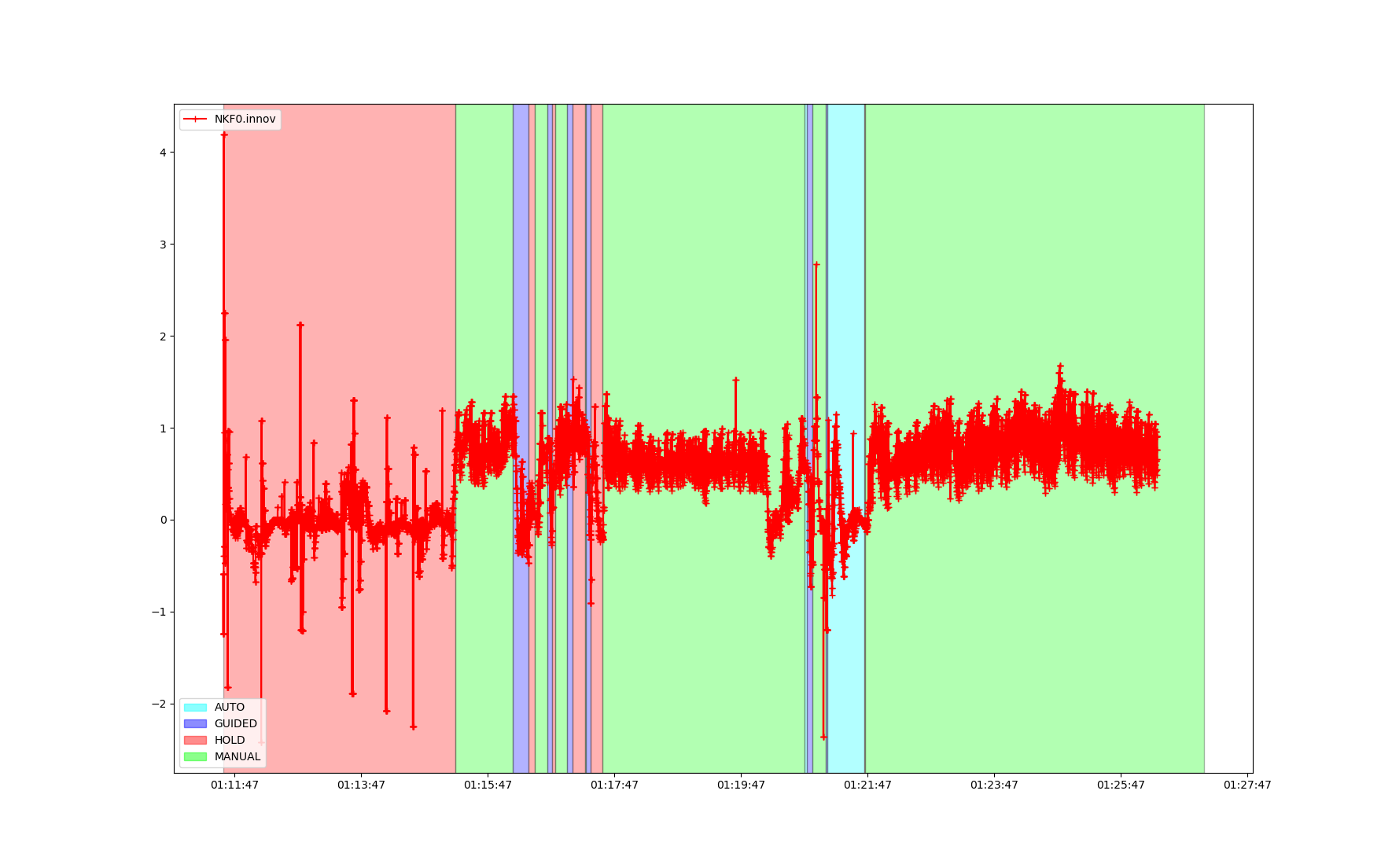
@rmackay9 can you take a look at this? especially the raw BCN messages which are being recorded in good time (quite healthy) but the XKF0.BPN ,for example, is very unstable and the XKF0.innov is also very high. Any ideas as to why this could be happening?
@rmackay9 should the beacons really follow the same structure as Pozyx? WRT ‘N’ Shape with the beacon 0 as the origin?
This test was done with EKF2. The rover did not jump around too much on the map but there were still some issues with the yaw as the mapping to real north was not perfect
The log file is here.
https://gofile.io/?c=ewe0VV
Karthik,
The order of the beacons isn’t really important as long as it’s documented. The EKF itself doesn’t care about the order, just that the positions of the beacons are passed in.
Okay, but how will setting the BCN_ORIENT_YAW work? Is it still angle between Axis joing beacon 0 beacon 1 and the true north?
and i am happy to report that i tried this on the Rover that ran with ChibiOS FW. No bugs so far 
@rmackay9 i have made a PR for the wiki with some changes to the marvelmind page. Can you please take a look at it when you’ve got the time?
Hi Karthik,
How did you manage to get it working? Can give me some tips? 
Hey Mien,
Yeah i’ve updated the wiki with some instructions! can you check it out?
The problem with EKF still remains though. It simply refuses to get a proper fix or the position jumps quite a bit
Did you already try it with the latest code?
and one more thing. Could you please follow the wiki and let me know if you face any problems? will update it in case you face any difficulties.
and can you please try EK3_ALT_SOURCE once with 0 (Baro) and next time 3(Beacon)?