Hi Guys, in the past few days I lost one of my mapping drones and Im still struggling to know what cause the problem. I have fly in this area for several years and never have this problem.
We were mapping an open pit mine and we take off hand launch the delta wing. It flies to the first point of the mission without problm but suddently the drone start flipping around gaining and losing altittude.
We hit RTL, but the dron keep flipping and doing crazy movements while going away with the wind until we lost telemetry.
From looking at the log I think you have had some kind of servo failure, the outputs from the servos aren’t matching up with the movements of the plane, they are at the full deflection a lot of the time, there are no errors from the flight control system, so I would guess it’s a mechanical failure of one of the servos or the linkage.
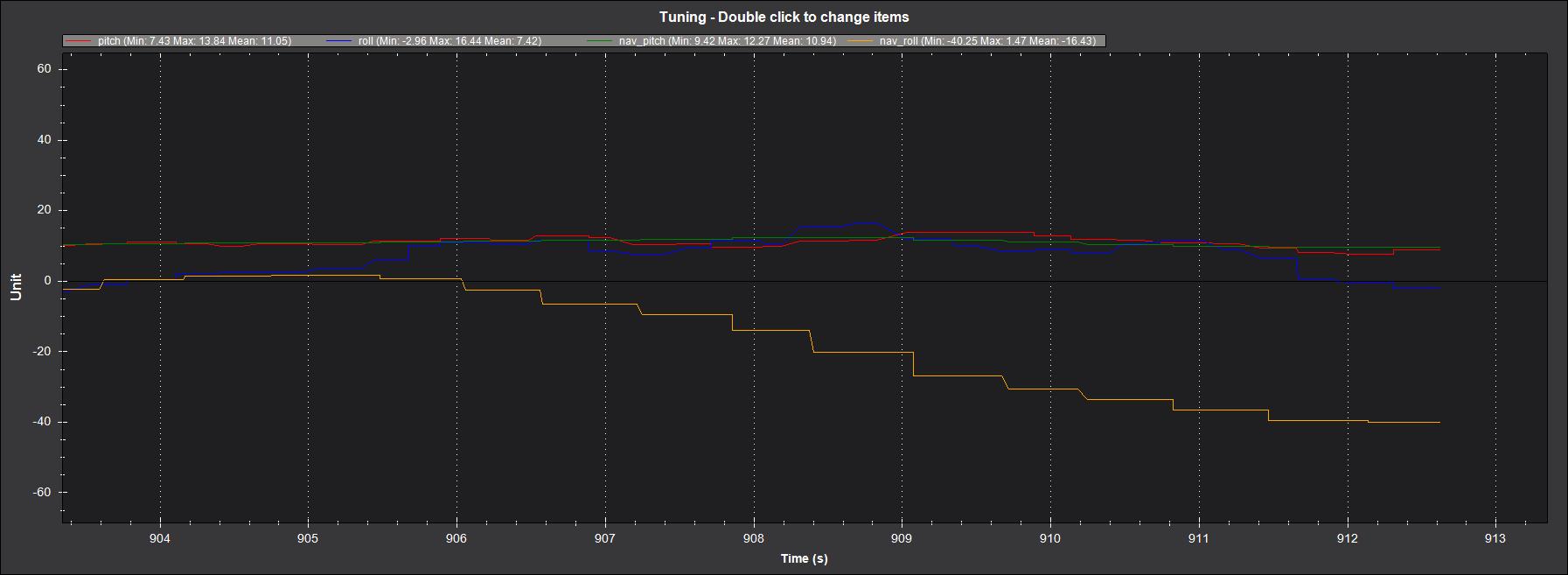
It looks like the plane was a little sluggish as issue slowly got worse but the main failure happened at 54.4% in the log thats when and nav_roll start to drastically diverge from the actual roll of the plane.
Normally when a flying wing looses a servo its pretty much instant catastrophic failure but because I think your plane is sightly nose heavy and either your motor is tilted slightly or the wing just naturally wants to pitch up, with enough speed it could pull up then use one elevon to keep it level. but as soon as it tried to make a turn the 60 degree bank angle is so steep that it looses pitch control so tries to pull up instead of turn and it keeps repeating that, as its doing the circles every time the heading lines up with home it tries to turn the opposite way causing it to roll uncontrollable the other way.
I doubt the plane could have been landed without a very large flat open space as it would have to be a very high speed shallow approach to keep pitch control.
The best mitigation for this is to have multiple servos, split each elevon so that it has 2 parts each with its own servo, that way if you loose one you will get degraded control but it will be able to land.
Thank you so much Francis. I agree with you in the servo fail.
In the very last seconds of the tlog the plane sent a final coordinate almost 30mins after we lost connection. This coordinate can be an error or it might be the location of the crash?
We found it today exactly in that last second coordinate. It was 8km away from the take off site in the top of a really big tree. Indeed the problem was a servo. The drone had one stuck aileron.
I’m really glad because this drone had a thermal camera onboard and those are really expensive.
Great you found it! Could you give some insight into what caused the failure? Did the servo fail, or was it some mechanical link to the aileron? I think experiences like this are great to share to help the community keep their aircraft safe Thanks for sharing!