I am having trouble tuning a large 15lb. tarot-based quad-copter with 22" propellers. Initial Setup is complete and it has flown many successful test flights in stabilize. The DataFlash logs show that the drone is not very stable, however.
I believe I have found a good P value for Rate Roll and Rate Pitch. The critical P value I found to cause oscillation was about 0.140.
I have the PID values set the same for Roll and Pitch and so I will be referring to both at once.
FLIGHT 1:
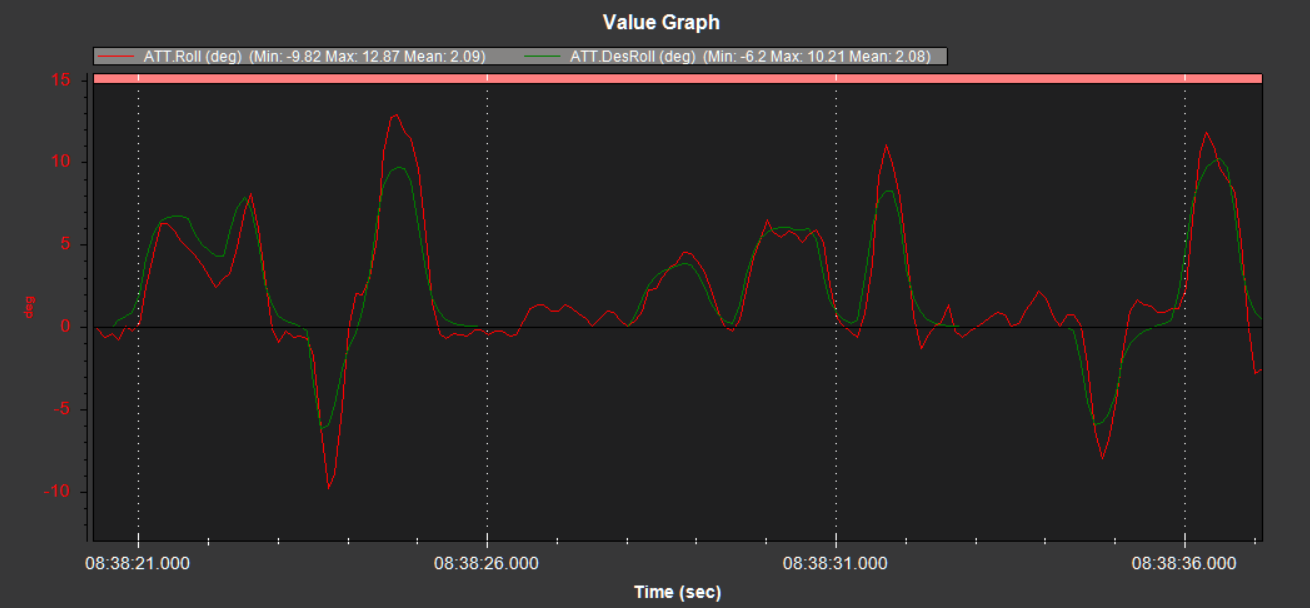
P = 0.07776
I = 0.07776 D = 0.002488
Here is a plot of Roll vs. Desired Roll for these settings:
I am not good at all in control matters… but one advice is to update your firmware version to latest stable 4.2 (in fact, checking your log doesn’t seems to me that it is actually in 4.0, it seems to be newer, please confirm this information).
Also, update your here3 urgently, it is spamning lots of messages and it is not good.
A difference in motor outputs between clockwise and counter-clockwise motors indicate frame or motor mount twist leading to a yaw imbalance. Fixing that now will improve tuning results.
MOT_THST_EXPO might be too low, maybe try 0.4 or 0.5 - the jury is still out on what should be used with TMotor Flame ESCs. If you have anything else then use the standard calculated value: 0.76
For later after more tuning, the MOT_THST_EXPO can be adjusted as follows:
set too high you can see instability at low throttle
set too low you can see instability at high throttle
Now the instability and crazy oscillating motor outputs…
I think your “RATE” PIDs are probably going too low and D term will be getting to be too high as a proportion of P and I. Always check for hot motors, you can even hear the oscillation and high D term effects as a “mechanical” kind of noise from the motors.
I would try these as a starting point, and if there’s oscillations start by reducing the ATC_ANG P values a bit until the oscillation goes away or is at least reduced.
ATC_ANG_RLL_P,6.0
ATC_ANG_PIT_P,6.0
ATC_RAT_RLL_P,0.1
ATC_RAT_RLL_I,0.1
ATC_RAT_RLL_D,0.00625
ATC_RAT_PIT_P,0.1
ATC_RAT_PIT_I,0.1
ATC_RAT_PIT_D,0.00625
then follow on with the tuning guide
Lets see the next log.
@BrunoBagarini
The firmware version is V4.2.3, sorry for the confusion. Also, the here3 has now been updated.
@xfacta
I spent extra time making sure the motors were mounted without any twist and that seemed to help equalize motor output. After further tuning, I did get very close to your suggested PID values. For the next test flight, I set them to your suggested PID values with:
ATC_ANG_RLL_P = 6.0
ATC_ANG_PIT_P = 6.0
The results were similar to before with stabilize feeling okay but loiter looking a bit more unstable with some oscillation. Unfortunately, there was a small breeze during this flight. It seems to overreact in wind conditions, resulting in a fast but relatively low amplitude wobble (+/- 3deg.). I will reduce ATC_ANG P next test flight to see if that helps. I am posting my results as of now: