Using Ardurover 4.3.2 all default parameters (attached) when the robot is in manual mode and the robot is armed the robot drives backwards. Expected behaviour is that the Throttle is neutral at 1500 and robot is stationary.
When the robot is disarmed the throttle is 1500 as expected and robot doesn’t move.
Additionally can’t push the throttle forward with the remote, even when trying fully forward. Any ideas why is this happening?
Personally I do it like this: Make first sure that the vehicle moves in the correct direction in automatic modes. When it does so automatically, but I observe that manual driving forward makes vehicle move in the opposite direction (backing instead of moving forward) I reverse the signal in the remote. And then this setup is done.
Sorry. Your robot moves backwards even when the throttle stick is on mid position and not moved at all? Even though the mid point (zero throttle) in theory is 1500, it might not be the case for your ESC. I have had to manually adjust the mid point for a boat I built (in my particular case to around 1470) to fix such a problem.
Also (not the case for my ESC above) if you can calibrate your ESC (max forward, max backward and mid point) this should solve such problems.
Might not be totally relevant for your issues, but at least worth looking into.
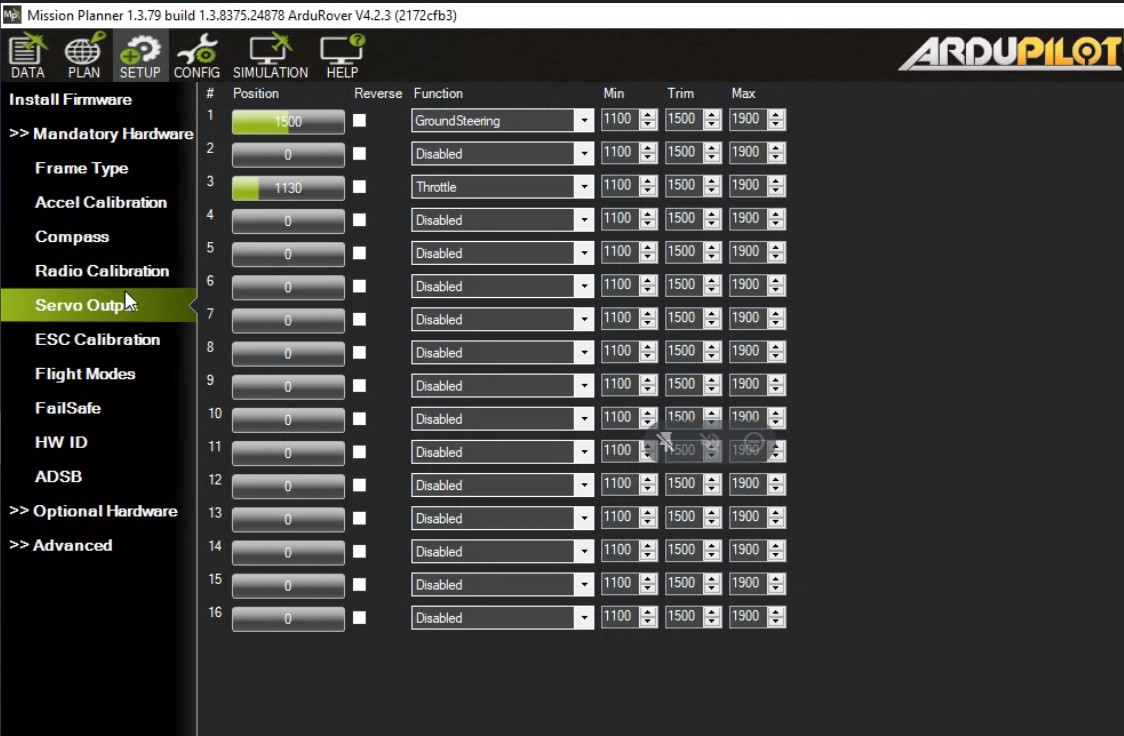
I did not look at your parameter file yet, but your screenshot shows the the throttle input at 1130us. which is full reverse normally. Which stick do you want to use for throttle control? Is your transmitter set to AETR channel order? I usually switch throttle and pitch, to use the pitch stick for throttle control.
To confirm the issue is that there are no stick inputs. Both with remote control on and no inputs touched and also with remote control off.
The robot should not move, throttle should be neutral 1500.
But it moves full backwards, why?
I guess you followed the instructions during RC calibration and pulled the throttle down at the end. So RC trim is now at RC min for the throttle input. Do the calibration again and leave the throttle centered at the end or set RCx_trim (x being the number of the throttle channel) to 1500us in the full parameter list.
Yes, but radio is calibrated correctly and is normally in the middle position at 1500. RCx_trim is at 1500. Also the problem persists when the remote controller is OFF.
Surely when the RC is off, in manual throttle should be middle position at 1500…
I can not see any obvious problems with your config. All servo and rc settings look ok. I remember one of my rovers steering full right suddenly. All settings were unchanged and the servo was fine. After saving the parameters, setting everything to default, flashing plane/copter and then flashing rover again, the steering was centered again. I suspect a switched bit somewhere. Perhaps it is the same here.
There is no ESC. I am using a companion computer to read the servo output controls and send commands over can-bus to the motors. Eventually planning to change to a Lua script of the same function.
In any case the servo output is indicating what the flight controller is trying to do, and what it is trying to do is to drive backwards. I am trying to figure out why? If I disarm it is correctly sits at 1500 so seems it is set correctly to what stationary is. Additionally a parameter reset fixed it which makes this very strange, meaning a param is causing this.
Thank you very much for the quick replies and all the help, it is much appreciated to receive such a quick response.
I am still worried about this original issue though because it causes the robot to be unsafe, full backwards speed as soon as it is armed.
The params I posted were the ones that caused the issue. The fixed params (for now) are simply the defaults of firmware 4.2.3, I will experiment more as I make changes.
I am not sure that this was a trim issue as you can see in the params that caused the issue, as this seems correct to me:
SERVO3_TRIM,1500
RC3_TRIM,1495