I might be able to embed it in a mission using the “unknown” option (if its in ardupilotmega.xml) but it would be really handy to have control to operate the gear manually on the fly.
Since ArduPilot will deploy and retract the landing gear on take off and landing, I’m guessing it uses the MavLink command (2520) I noted above.
The RCx_Option will probably do it - I’d just have to figure our how to set up my HereLink to toggle between a low and high pwm signal in the deploy and retract range.
Probably the thing to do is just disable it until I get it flying. But I’ll need to retract the gear for an accurate auto-tune.
By copy to @Michael_Oborne - is there any chance that there’s a control in Mission Planner that I’ve just not managed to find that allow the pilot to manually operate the landing gear?
Of course retractable landing gear have been around a long time. Do you happen to know what MavLink command was used for landing gear deployment and retraction before this?
And now that the new command is added - do both the old and new commands work?
Now - if I can just find the way to get Mission Planner or QGC to trigger them.
MAV_CMD_AIRFRAME_CONFIGURATION is the only command for controlling landing gear and it is quite old. During draft phase it was briefly called (…)_LANDING_GEAR but was renamed for reasons incomprehensible to me.
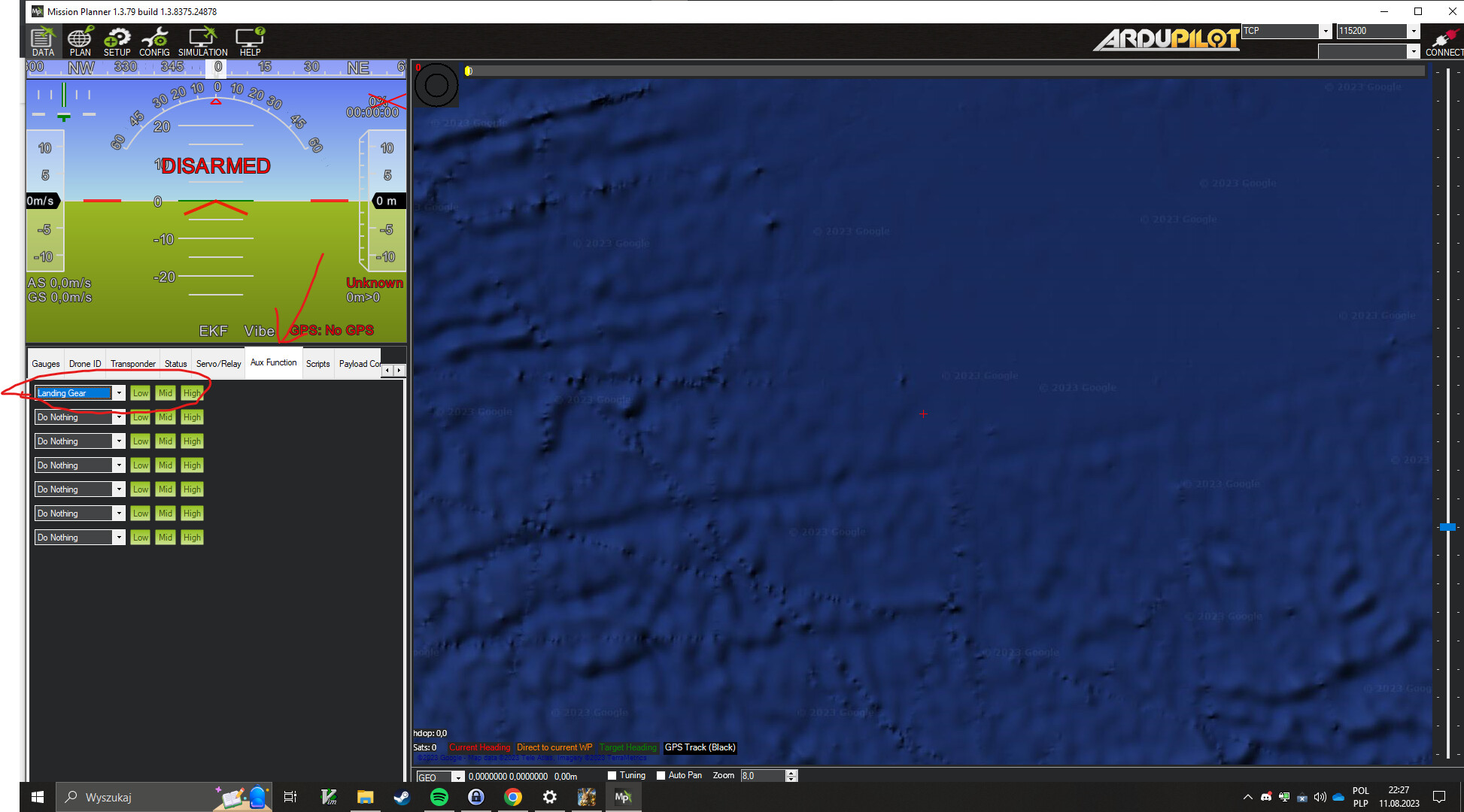
Mission Planner may be able to do that using aux functions which pretty much emulate RC switch behavior.
I thought @LupusTheCanine was referring to this type of thing.
Unfortunately - this only works embedded in an auto mission. I want to be able to execute these functions at any time - either by a selection on the ground control app, or a button on the ground controller.
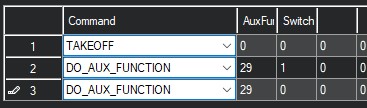
Also - I’ve not used the do_aux_function command yet - I’ve only used “unknown” - where you have to enter the number of the MavLink command. I’m guessing it works either way.
I am a bit confused as to why you couldn’t just use a button on the herelink paired with RC_Function for this? Otherwise it will have to be handled on the QGC end on your Herelink.
I have SERVO8_FUNCTION=29 so that ArduPilot uses the Main-8 port controlling the landing gear. This would be for the automatic retraction after takeoff and automatic deployment for landing.
If I then set RC8_OPTION=29 (or any other RC channel since it “29” maps to “landing gear”) then the PWM commanded from the transmitter ought to be passed along and control the landing gear.
There are a couple of questions/concerns with this approach.
What happens if the RC input channel PWM conflicts with what ArduPilot is determining to do automatically? For example, if ArduPilot has commanded “retract” after takeoff - what will it do when an over riding PWM signal comes in over an RC channel.
If there is no problem - then there is the switch issue on a HereLink - which has no toggle switches. The HereLink buttons can be programmed to emulate a toggle switch - but it’s not ideal.
Ground control apps like Mission Planner and Qgroundcontrol have the ability to do many functions such as trigger the camera via buttons that send MavLink commands to the vehicle.
In my opinion, it would be a big help if the same support existed for the landing gear.
What happens if the RC input channel PWM conflicts with what ArduPilot is determining to do automatically? For example, if ArduPilot has commanded “retract” after takeoff - what will it do when an over riding PWM signal comes in over an RC channel.
The MAVLINK command from ArduPilot automatically is just a one-time send. So if you send a RC signal to change state it will just update to that. The landing gear function only executes when PWM state changes from between < 1700 to > 1700.
If there is no problem - then there is the switch issue on a HereLink - which has no toggle switches. The HereLink buttons can be programmed to emulate a toggle switch - but it’s not ideal.
Yeah, unfortunately only buttons on that guy. Would just keep in mind that pressing the button switches the landing gear state (there should a mavlink message to that shows up on GCS so you know what state it has swtiched into).
Thanks - I’ll look for that landing gear “state” in Mission Planner and QGC. I don’t remember seeing it.
I setup a HereLink button long press to do the landing gear deploy. (pwm 1900) And a short press to retract. (PWM 1100)
This works fine. Thanks for the clarification about the interaction with ArduPilot automatic retract/deploy function.
The manual deployment will be essential for running AutoTune. I’ll want to AutoTune with the gear up. And I have to land manually to save the new PID’s - so I’ll need to deploy the gear manually.