Hi,
I loaded for my rover and Pixhawk cube the software, I followed the instructions as Ardupilot sais,
I did the compass & radio calibrations,
the flight modes are set and ok
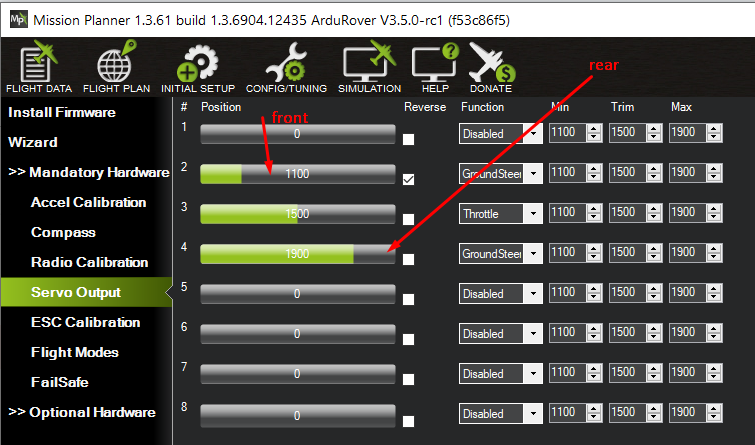
I checked radio disconnecting and connecting directly and the servos are working correctly. I reconnect the servo to 2 & 3 main out and the sbus to my X8R Receiver
Channel 8 in manual mode
And the rover did not work in manual neither in auto
I don’t know why that is. There is or was a bug in 3.5.0 RC1. I don’t know if that is the problem or not. You may want to go back to 3.4.2 while getting this set up. How are you powering the servo rail? Did you try and reverse the front and rear servo connections to see if the same thing happens?
No, no the Rover is powered from Power1
But I think the problem did not come from power, I connected to port 5 and the rover works perfect, but if I connect to port 4 the front servo start to gitter
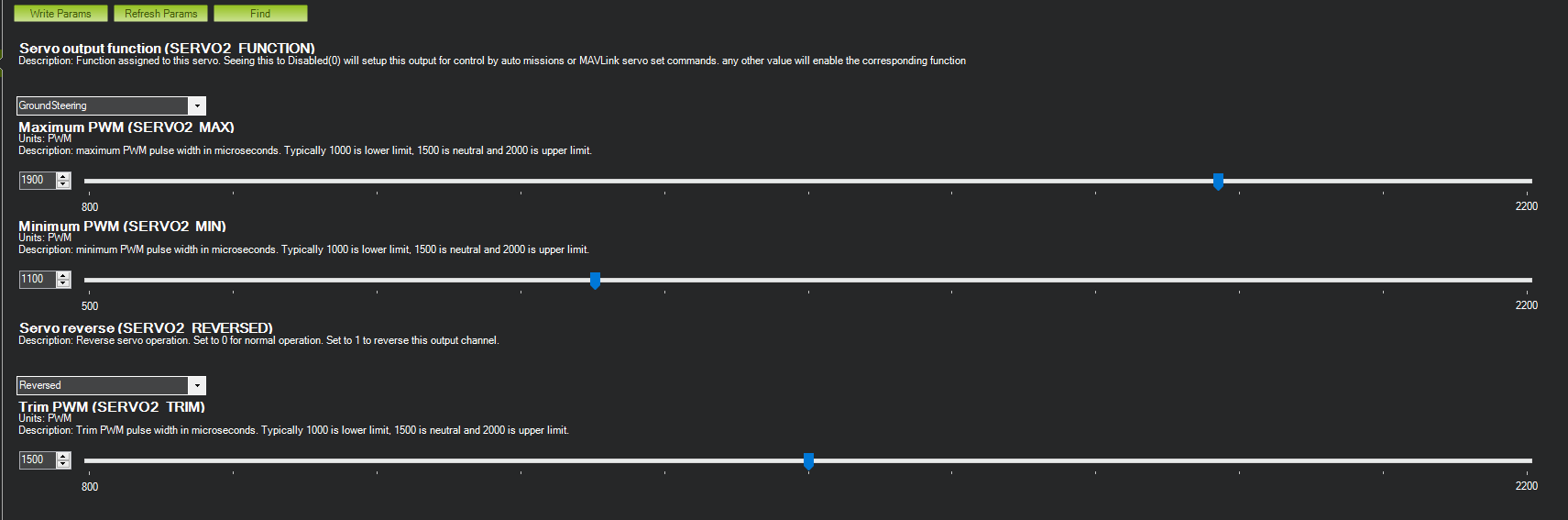
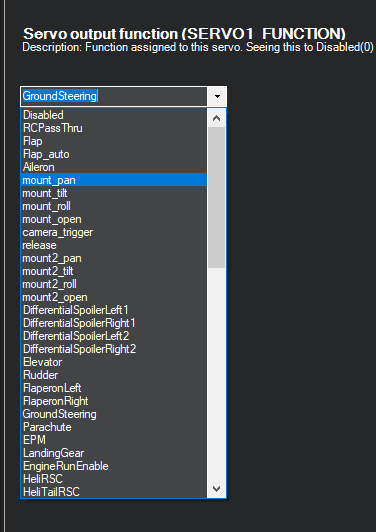
Is it possible instead of assign to a ground steering, make a mix of channels or something like this?
Hi,
I did and still gittering, I think that could be a power problem, may be I need more power.
Did you know how to increase power? I think that the new receiver plus two servos there is not enough power. How could I increase the power? changing the ESC? what did you recomend me?