I recently got pixhawk and GPS/compass and they are ready and calibrated with Mission Planner. I’ve also made a large timing pulley (epoxy casting) for the wheel that will be driven by a smaller pulley which will be driven by a servo. I hacked the servo, removed the internal potentiometer, and installed an external one that will be fitted as a rudder sensor belowdecks ( it will turn in synch with the rudder shaft). The servo will rotate the wheel until the potentiometer and rudder go to the desired angle. So far everything seems to work like a charm on the bench!!

1 Like
Sounds like a good plan for the wheel drive. What will you use for the user interface?
Thanks, So far using Mission planner for putting it together, but on board i ll have both a laptop and Q ground control on some kind of smartphone.
In the meantime, i wonder if there is any difference between the two wiring diagrams, regarding the ground reference to pixhawk rail. I tried the second diagram and was good, but not sure about the parallel connection first diagram. Any thoughts?

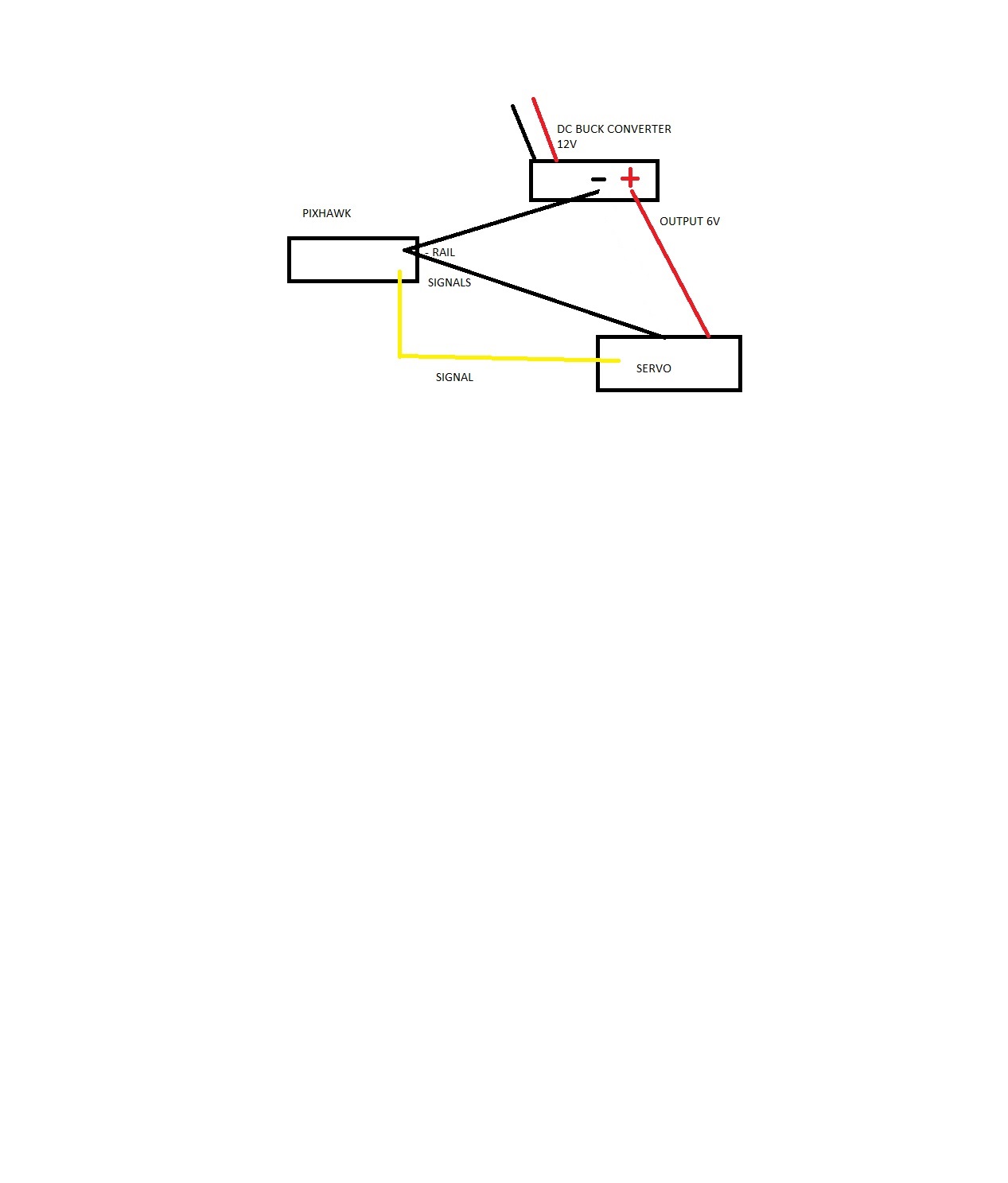
In theory, where the lines are 0 Ohms resistance, no difference.
In practice, the voltage will vary along the wires a small amount (V=IR). Since the servo signals are digital, it is likely to be not sensitive to any ground loop voltages though.
If I was to pick one, I would probably pick the first, because the high-current lines are directly connected (servo and power). The second has the servo current returning to the power supply through the pixhawk, so there could be differences in the ground voltage along that path. Probably not enough to see an effect on the digital signals.
In the second image, if you connect the two black wires using different pins on the pixhawk (like servo and telemetry grounds) then all your motor current is going to travel along the pixhawk circuit board, and this is probably bad and I would advise against that.
1 Like
Thanks for the help meholden! I will update the thread as moving on with the project.
Finished the drive unit and testing the ground steering function in Manual mode with the gamepad!