Can someone take a look at this log from the maiden flight of my new quad. Here is the setup:
Holybro pixhawk 2.4.5 with V3.4.2 quad
Ublox NEO-M8N GPS
volo systems “the power” PDB
Mauch 100A current sensor
U7 v2 420kv motors, 17.5" CF props
rc tigermotor 80A esc’s
13,000 mah 6S battery
Finished build, calibrated esc’s, checked motors/ props/ direction, set and calibrated RC, Failsafes, calibrated current sensor, went outside and calibrated accel and compass. Good to fly, no messages, did a slow run-up, took off and hovered 2 feet above ground. Everything was perfect, solid control on pitch, roll and yaw. Hovered for about 1 min then suddenly copter flips over on its left side and crashes upside down about 20’ away. During crash I had zero control.
Thanks for any suggestions.
Luke
1.BIN (593.6 KB)
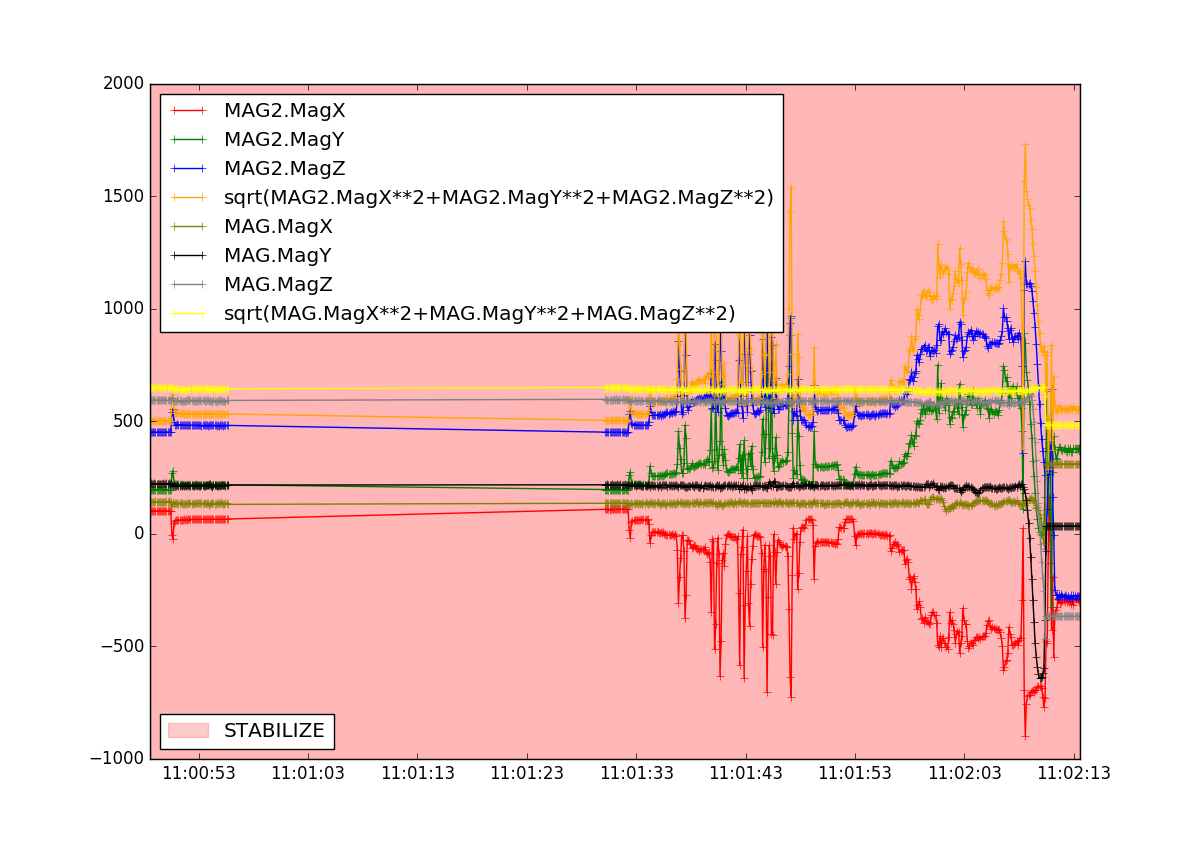
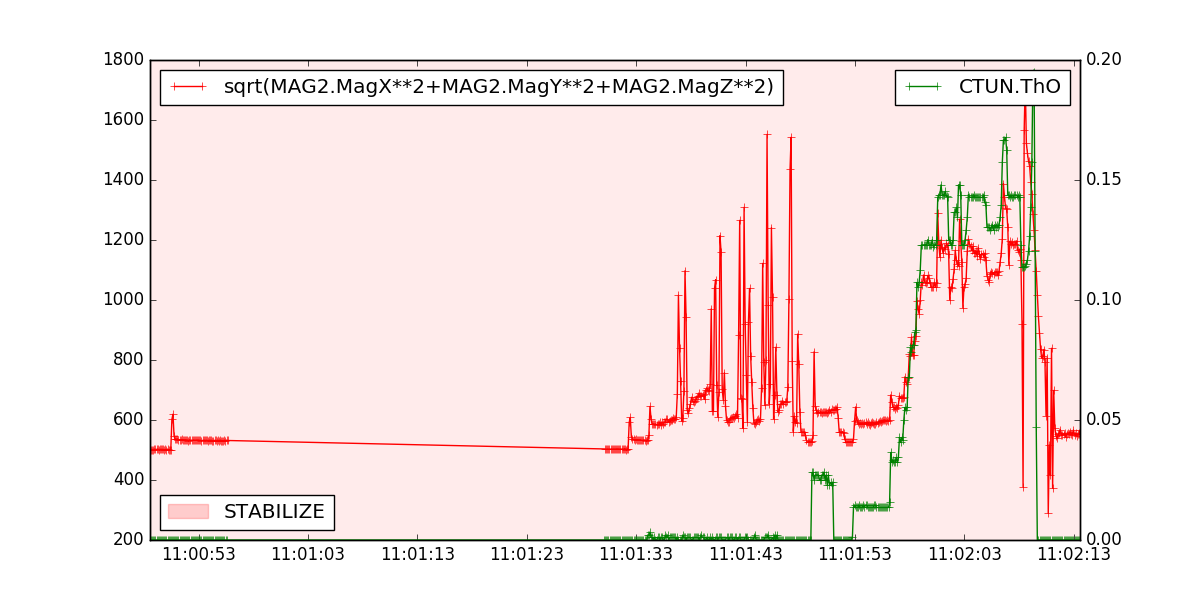
 Your vehicle’s estimate of its attitude has broken because your magnetic interference was so high.
Your vehicle’s estimate of its attitude has broken because your magnetic interference was so high.