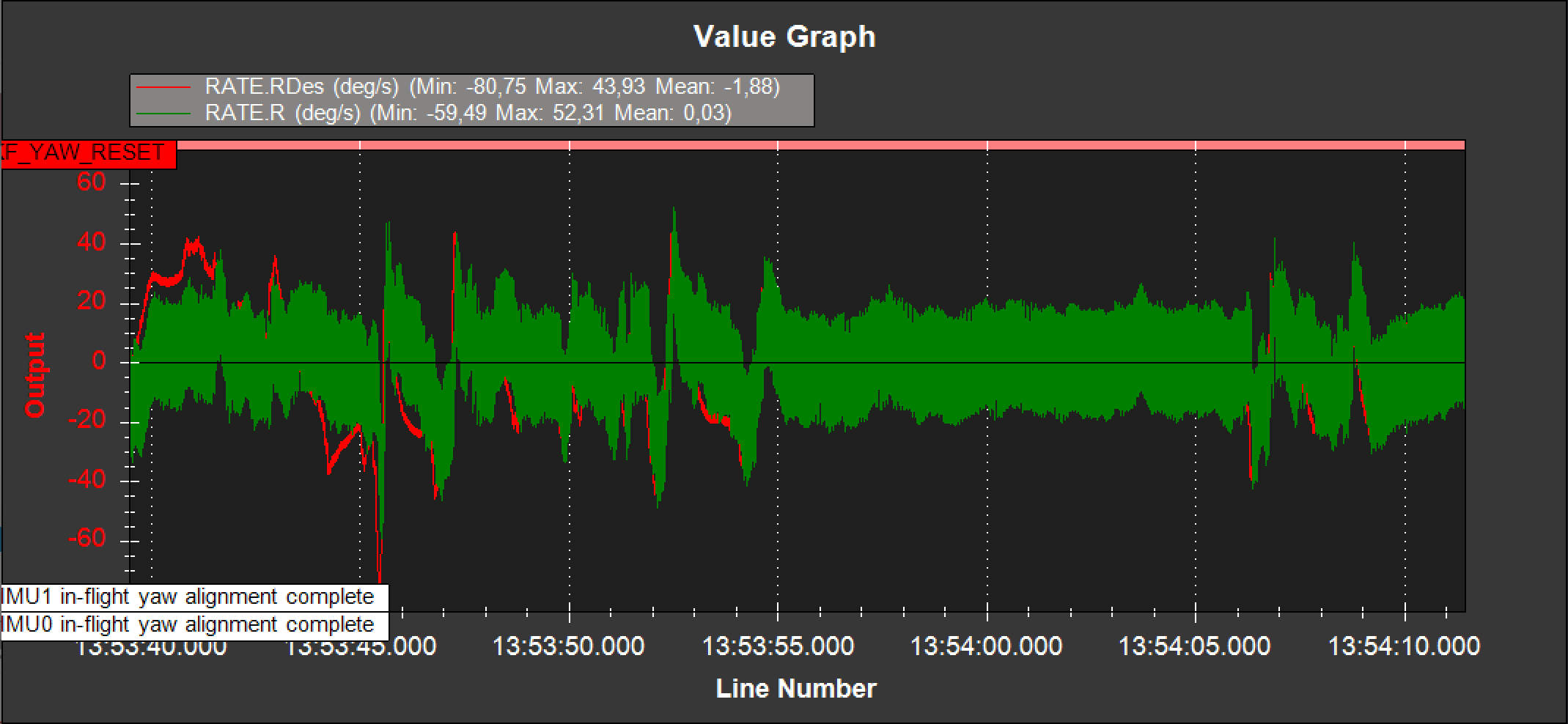
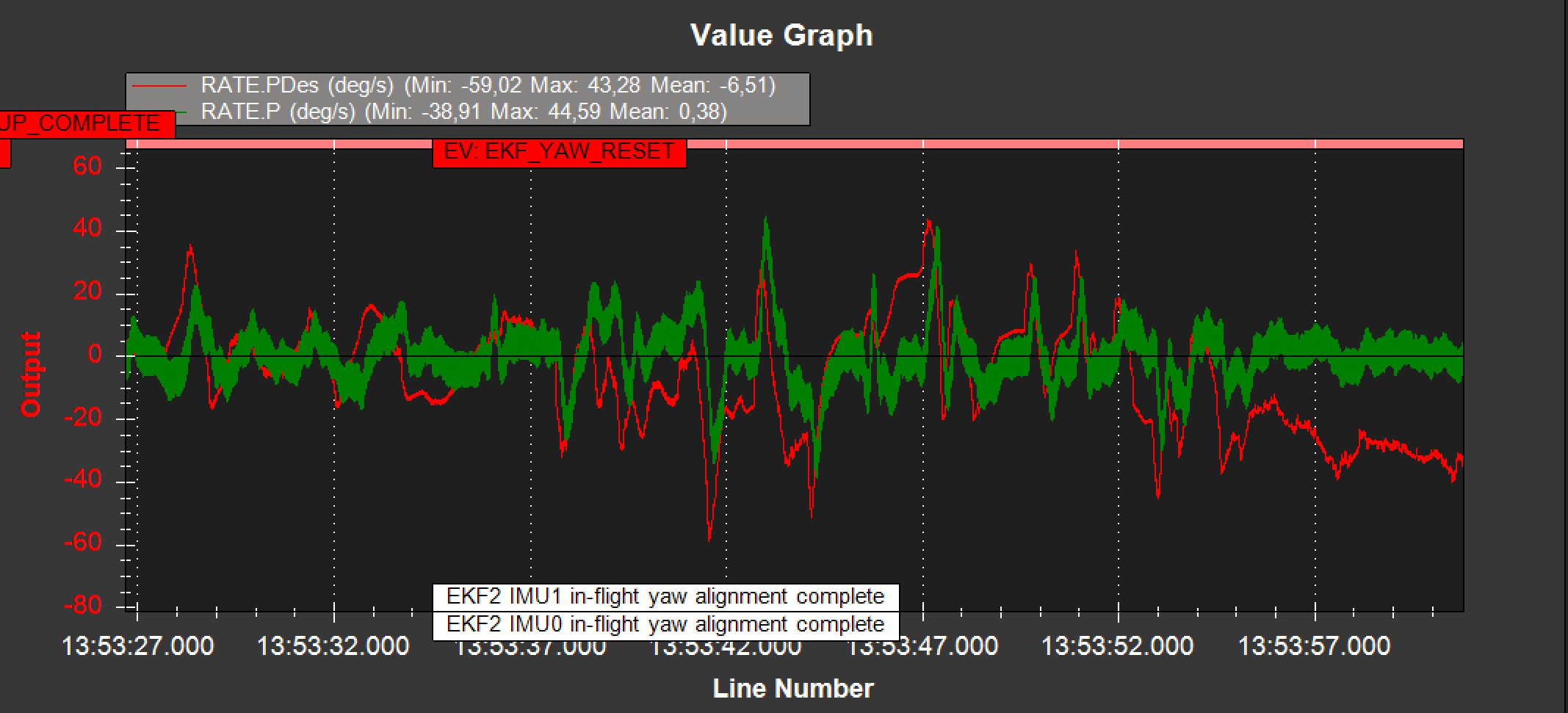
While looking at the log for desired and actual rates, I notice there is an awful lot of noise on the traces, as well as the fact that the two don’t line up properly.
Reading the wiki, it is stated that if the two don’t line up, it could be due to the swash not being leveled properly.
Any input is greatly appreciated.
Thanks in advance.
/Oliver
The last flight I posted about was flown near a set of high voltage power lines, and the log analyzer reported compass errors so I wanted to do a flight in a different location with optimal conditions, which I did today.
Sadly I experienced the same behavior as the previous flight.
I have posted the log and if you get the time to take a look I would greatly appreciate it.
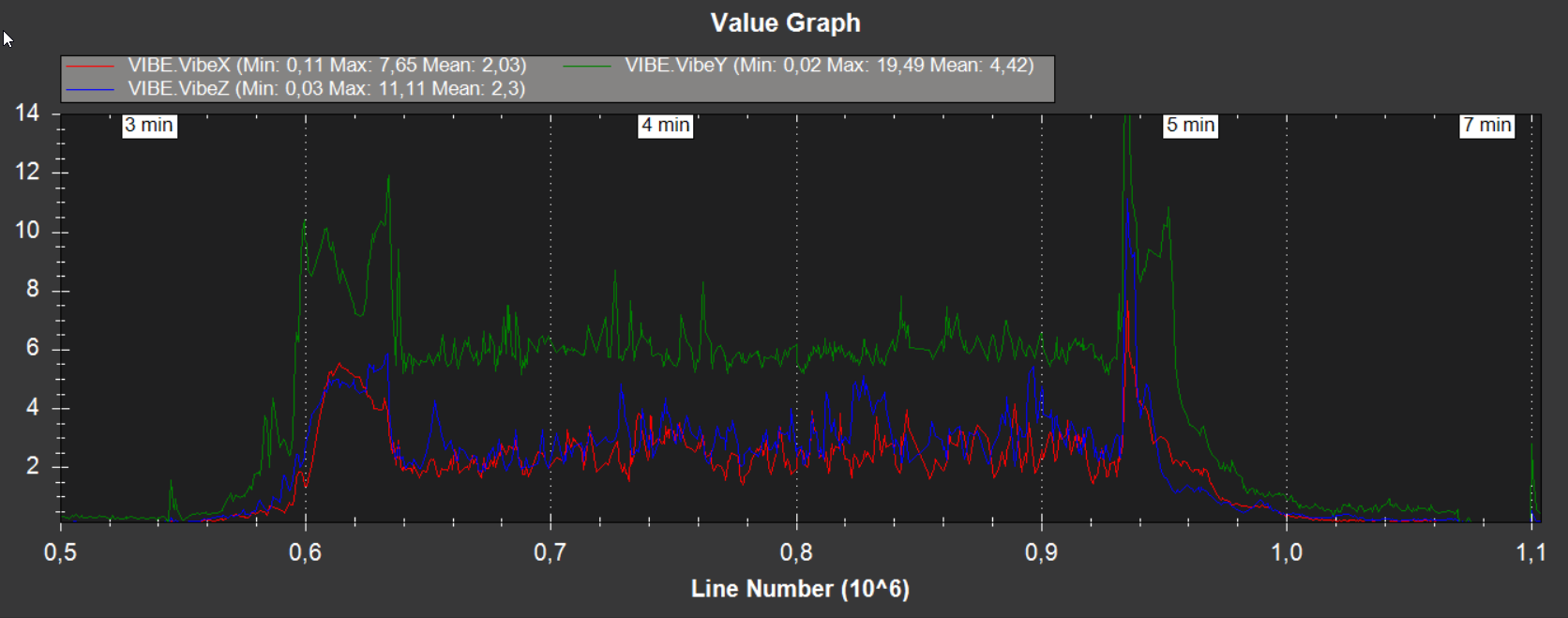
When looking at the measured rate of the craft it has a great amount of high frequency noise, and while not as pronounced, the desired rate also has high frequency noise on top of the actual signal.
I would assume this would be the result of a mechanical issue, but the VIBE figures are below 10 on 2 axes and around 15 on the final axis. It also seems very odd to me that the desired rate, calculated by the flight controller, would be noisy as well.
I would really appreciate any help I can get on this issue.
Hi Bill,
Thanks for getting back to me so quickly, I have not yet made sure the rotor system is tracking/balanced, so I will try to get this done in the coming flights. Good to know that it in fact is a mechanical problem.
You really need to pull the head and shaft as one unit and balance the rotor system. Here is a post where I provided a video on how to statically balance a rotor system. Statically balancing a rotor system
Thanks for posting Bill,
Yeah I will have to get one of those. I tried arming the helicopter without running the motor and moved it by hand, and the RATE traces where clean so it is definitely a vibration issue.
It has been a little while but I have purchased the same prop balancer as used in your video, but I’m having some trouble getting the rotor to stop at any angle. It will balance with the blades parallel to the ground, on either side. But as shown in the end of the video it seems to favor one of the sides over the other. Does this mean that the head is heavier on one of the sides, and how to combat this?
@Oliverl96 I would say if you have the rotor system balancing with the rotor blades parallel to the ground then I think you have a good balance. I’m not sure that I can explain why it wants to always come back to rotor blades parallel and not remain at any angle. It is possible that you are now seeing effects of blades not perfectly straight out from the hub. I think at this point you can be confident that you have the blades balanced as good as possible short of using a dynamic balancing system that they use on full scale helicopters.
Yeah my first thought was also that the blades where not extending straight out, when simply pulling outwards while gripping the tips of the blades. So I actually spun up the rotor head on the helicopter, to get them perfectly straight, and then carefully removed the head and shaft, making sure to not hit the blades and then placed it on the balancer.
Anyway, I’ll call it good for now and try to fly it again hopefully soon.
I just watched your video and saw something you might have overlooked. The outer part of your swashplate is rotating when you turn the rotor and then the heavy side of it is slowly moving downwards and accelerating your rotor. That doesn’t allow a precise measurement.
Nevertheless I don’t believe this is causing the effect you are seeing. It definitely looks like the rotor blades aren’t straitened out perfectly. They might be in a straight line when the rotor is running, but as soon as you shut down your engine, they will leave their position. I know that, because I’ve installed lead-lag sensors in a helicopter and wanted to calibrate the zero-position. Not possible like that. I had to average the position of the flight measurements.
I did notice that the part of the swash that goes into the anti-rotation bracket would rotate downward slowly. I have tried letting the rotor blades go while holding onto this piece by hand and it gave the same results.
Interesting about the blade lead and lag. It makes sense that they would leave the straight line as soon as the rotor slows down. Didn’t think of that.
How can you then ensure that the blades are completely straight out from the blade grips. I have tried holding onto the ends of the both blades while pulling outward, and it balanced the same as when I spun up the rotor system on the helicopter.
My question is whether or not this will cause problems with the EKF as the vibrations are still present, just filtered away. I believe I read somewhere that the EKF doesn’t use the filtered gyro data.
@Oliverl96. Those vibes are really good! I think you should raise your gyro and accel filters to 20 and leave the notch the way it is. If your rotor speed is 42 hz then I think having the ins LPFs at 20 would be fine.
Also those vibes should not cause any issues for the EKF.
Nice work!
Alright, I will raise the cutoff frequencies to 20 again.
I do have one more question already. When looking at the desired and actual rates for roll, pitch and yaw, it is clear that the FF needs to be tuned as the amplitudes are not matching, but it also seems like there is an offset between the two. The wiki says this can be caused by poor CG or the swash not being level correclty. Should I look at leveling it again or try to tune the FF values first?
ILMI for both pitch and roll is set to 0.08 but the I gains are at 0 at the moment. I will get to tuning then as soon as I have at chance to get out and fly again.
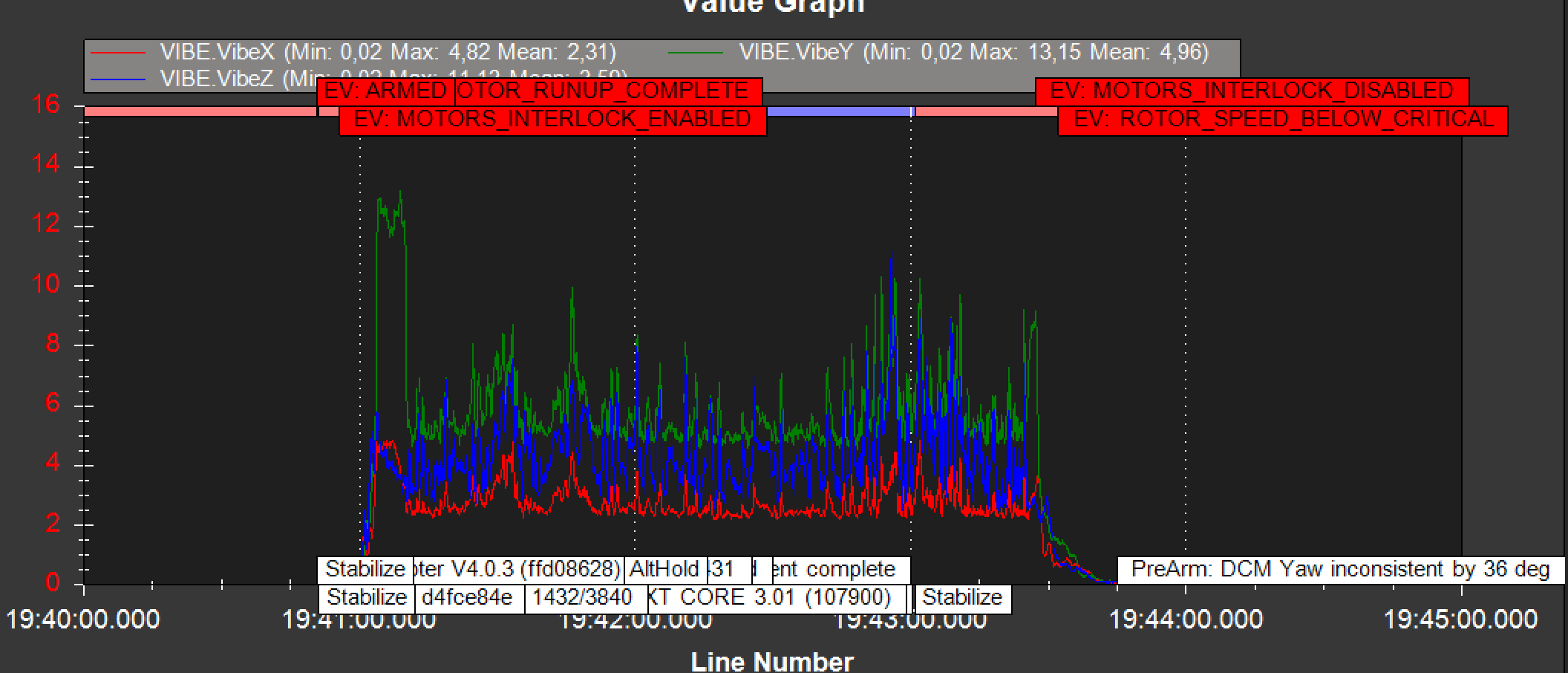
I don’t think there is an (easy) way of moving the blades in a perfectly straight position. The hard way would be to build some kind of frame that you could align to the long straight lines of the leading and trailing edges of the blades. But I don’t think you’d really need that. As Bill already said: Your vibrations look pretty good. After the balancing mine looked pretty much like yours:
But I think the system has degraded quite a bit since then. Or maybe it’s because I never tried such a calm hover flight since then.
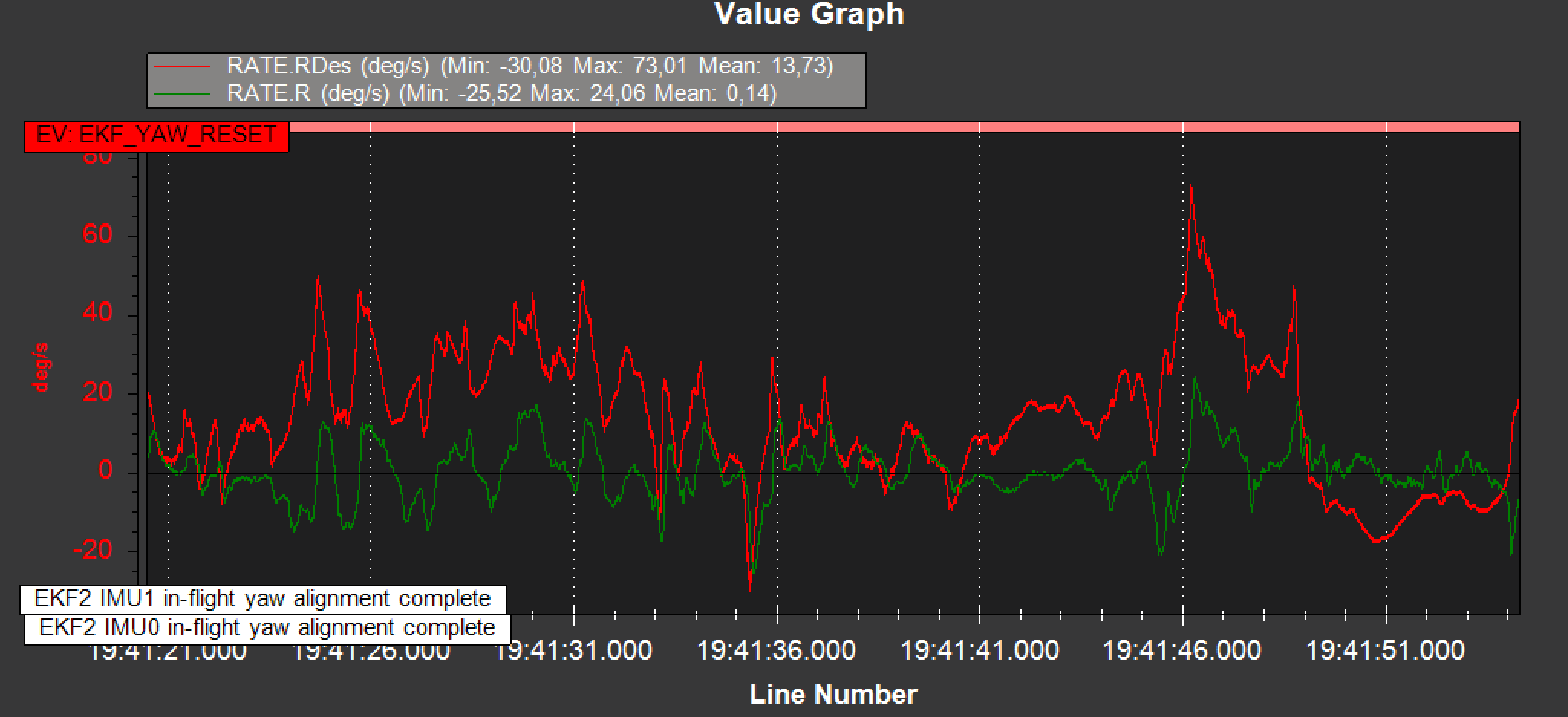
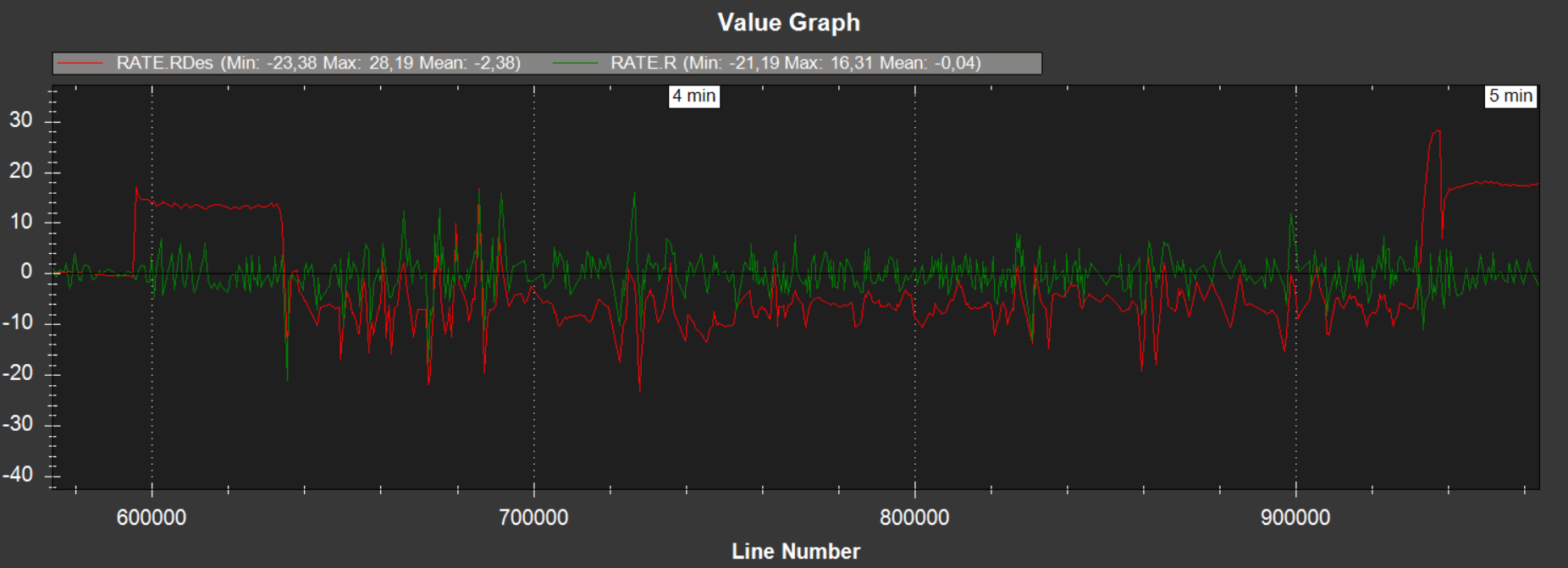
But the thing I noticed: Your rates look way noisier than mine. This are the rates of the same flight I showed you before. You can also see that offset, because I had my I gains at 0 back then. Just like yours.
But the graph looks completely different. I can’t see those periodic, sinusoidal oscillations which are pretty strong in your log.
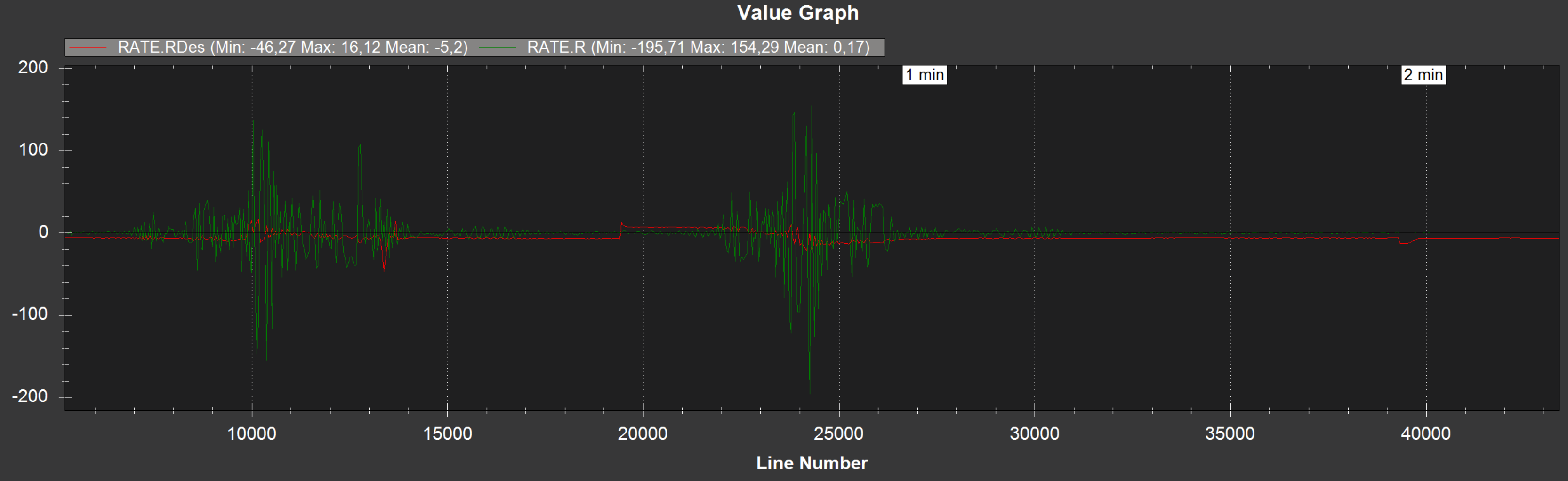
So I have a theory what might have caused your problems: Would it be possible, that your controller mount is too soft and the controller is constantly oscillating around on its base? I also started with a too soft mount and the helicopter almost tipped over on the ground before the rotor had spooled up completely. No way of getting it into the air like that. My rates of that ground test looked like that: