Hi,
I am about to take my helicopter out for its first flight soon, and would appreciate if someone would take the time to look through the param file attached, to see if anything looks out of the ordinary, as this is the first time I have set up an ardupilot flight controller.
I have read the wiki and followed Chris’ setup videos.
The helicopter is an ALZRC Fast Devil 420 (Goblin Clone) with 420 mm main blades. The swash plate uses three servos with the elevator servo in the front. Should the collective be reversed? All cyclic, collective and yaw inputs function correctly and the heli compensates in the right direction when moving it by hand in stabilize mode.
I have leveled the swash plate and configured the heli to have -3 deg to +12 deg of pitch.
The ESC has a built in governor which will be calibrated before the flight on the ground. The RSC Setpoint is set at 20 % in the uploaded param file, but after the governor has been calibrated, I intend to set it to 75 % for the first flight.
During the first flights I will try to make sure the blades are tracking, and then adjust the IM_COL_STAB parameters in stabilize mode so the heli hovers nicely at mid stick. Then proceed with tuning following the guide on the wiki.
I would really appreciate any comments/tips if I am missing something or straight up doing something wrong, as this is my first experience with ardupilot. If anyone has any PID setting suggestions for this class of heli I am all ears as well.
OK… I do not know Pixracer, anyway you will have to try step by step to check and see that all is functioning well.
I have the Devil450 with Kbar FBL controller and pixhawk as an autopilot. on preflight condition yet.
Oh, I don’t use a down stream FBL unit, only the pixracer.
Yeah I have checked mechanical travel, direction and so on and it is behaving as expected, my concern is whether I have missed something in the software.
Thanks for getting back to me.
Oliver,
I looked through your param file last night. I didn’t see anything that looked incorrect. You will need to raise the ILMI param for pitch and roll in order for the I gain to work properly once you set it. I normally use ILMI of 0.08 for both pitch and roll.
Hi Bill,
Thanks for taking the time.
Thats great news, I will fix the ILMI gains, and then hopefully I will get a chance to maiden the heli soon.
Knowing me I’ll most likely be back afterwards with more questions though.
No problem! Also I did notice that you had acro trainer disabled and the acro balance Params were around 2. When acro trainer is disabled and the acro balance Params are non zero then you have the virtual flybar feature. You might want to lower the balance Params some and fly it. Then increase them from there to get the feel you want. But I wouldn’t recommend flying acro until you tuned it in stabilize.
Good luck on you maiden flight. Sounds like you’ve done your homework. It should be uneventful.
Alright, yeah I plan on mostly flying the helicopter in Acro mode with the vbar functionality once it has been tuned properly, so I will lower the balance params to begin with and then bring them up from there.
Thank you!
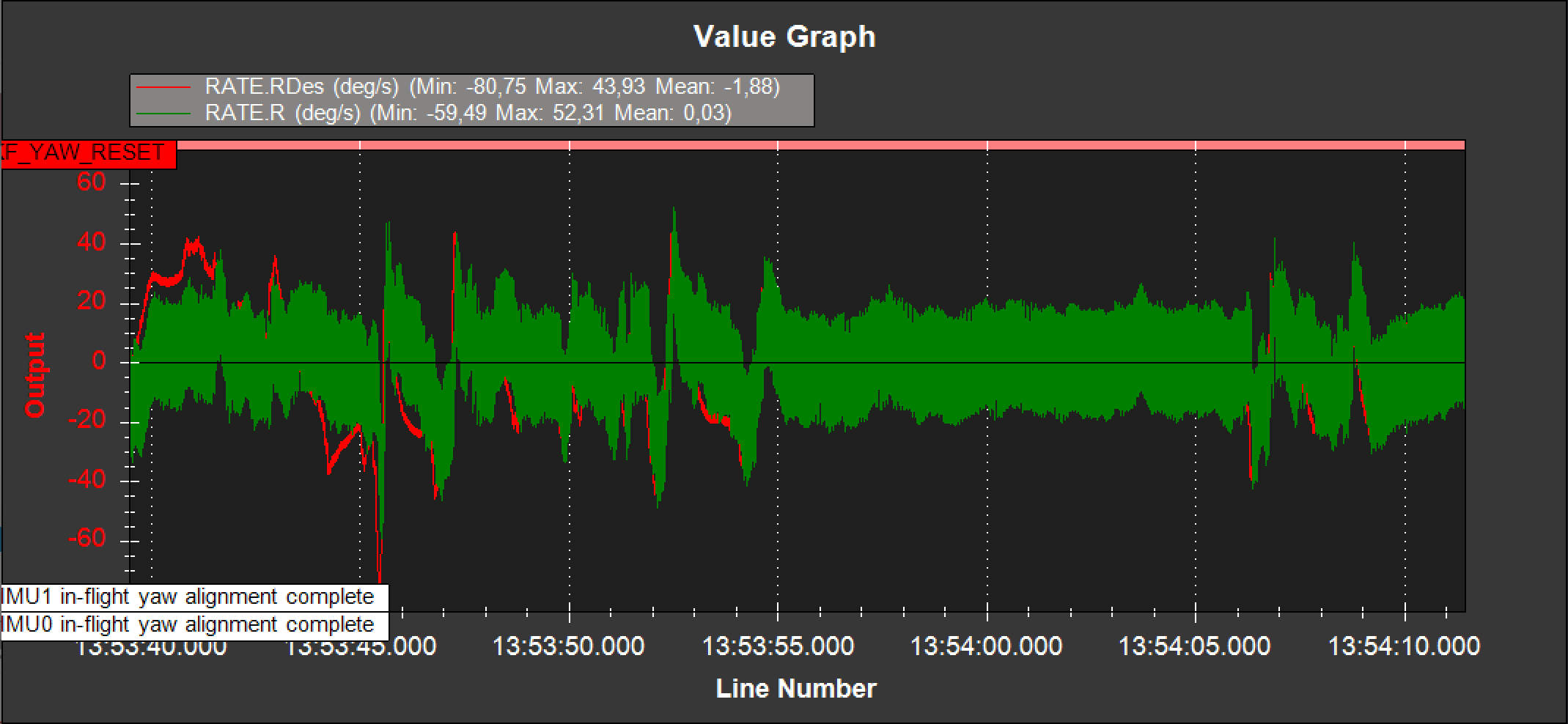
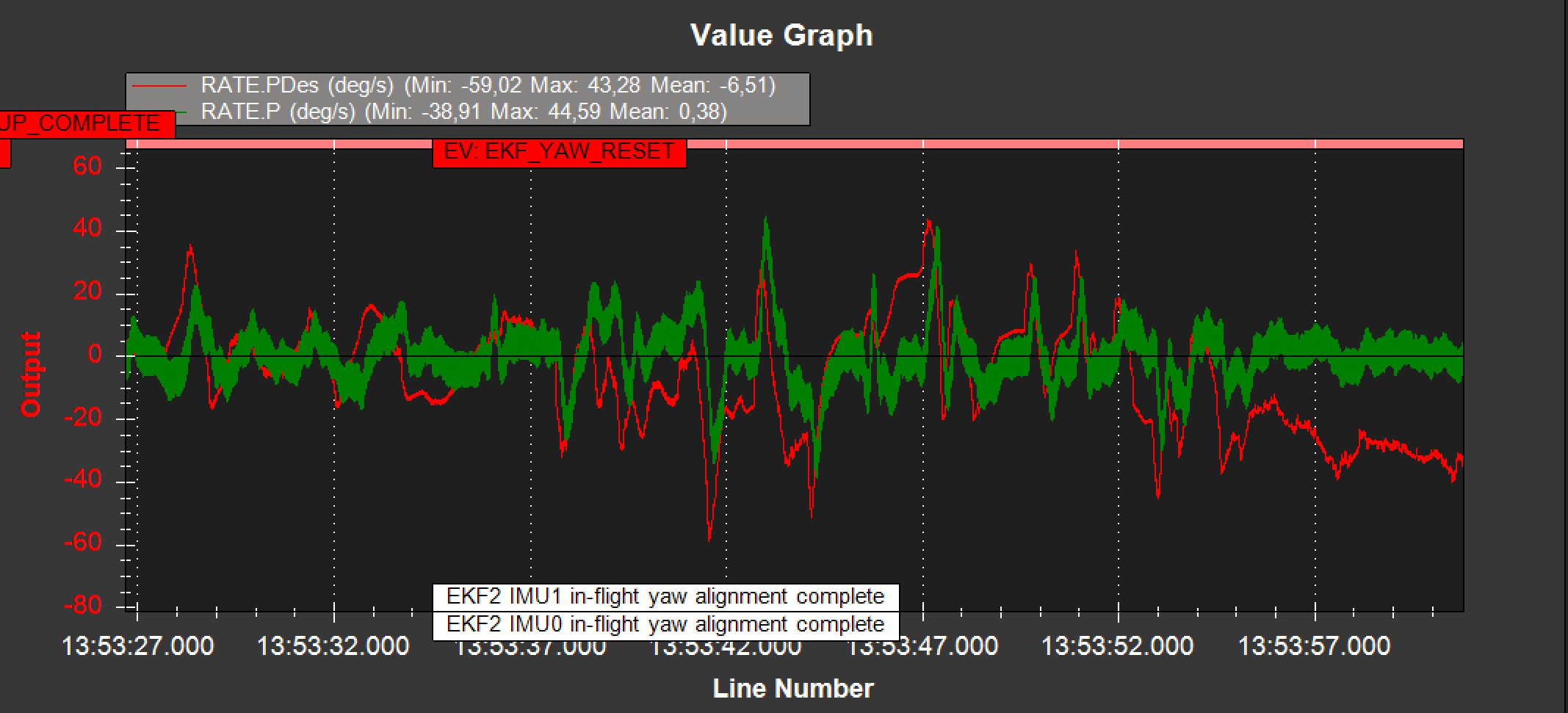
While looking at the log for desired and actual rates, I notice there is an awful lot of noise on the traces, as well as the fact that the two don’t line up properly.
Reading the wiki, it is stated that if the two don’t line up, it could be due to the swash not being leveled properly.
Any input is greatly appreciated.
Thanks in advance.
/Oliver
The last flight I posted about was flown near a set of high voltage power lines, and the log analyzer reported compass errors so I wanted to do a flight in a different location with optimal conditions, which I did today.
Sadly I experienced the same behavior as the previous flight.
I have posted the log and if you get the time to take a look I would greatly appreciate it.
When looking at the measured rate of the craft it has a great amount of high frequency noise, and while not as pronounced, the desired rate also has high frequency noise on top of the actual signal.
I would assume this would be the result of a mechanical issue, but the VIBE figures are below 10 on 2 axes and around 15 on the final axis. It also seems very odd to me that the desired rate, calculated by the flight controller, would be noisy as well.
I would really appreciate any help I can get on this issue.
Hi Bill,
Thanks for getting back to me so quickly, I have not yet made sure the rotor system is tracking/balanced, so I will try to get this done in the coming flights. Good to know that it in fact is a mechanical problem.
You really need to pull the head and shaft as one unit and balance the rotor system. Here is a post where I provided a video on how to statically balance a rotor system. Statically balancing a rotor system
Thanks for posting Bill,
Yeah I will have to get one of those. I tried arming the helicopter without running the motor and moved it by hand, and the RATE traces where clean so it is definitely a vibration issue.
It has been a little while but I have purchased the same prop balancer as used in your video, but I’m having some trouble getting the rotor to stop at any angle. It will balance with the blades parallel to the ground, on either side. But as shown in the end of the video it seems to favor one of the sides over the other. Does this mean that the head is heavier on one of the sides, and how to combat this?
@Oliverl96 I would say if you have the rotor system balancing with the rotor blades parallel to the ground then I think you have a good balance. I’m not sure that I can explain why it wants to always come back to rotor blades parallel and not remain at any angle. It is possible that you are now seeing effects of blades not perfectly straight out from the hub. I think at this point you can be confident that you have the blades balanced as good as possible short of using a dynamic balancing system that they use on full scale helicopters.