First maiden flight on a Octocopter today. Starts to yaw. Can’t figure out why. See link to bin file.
https://1drv.ms/u/s!AsyuUF9kIzhqgpVx9yYdIjaWh_I-Cw
Advise is appreciated!
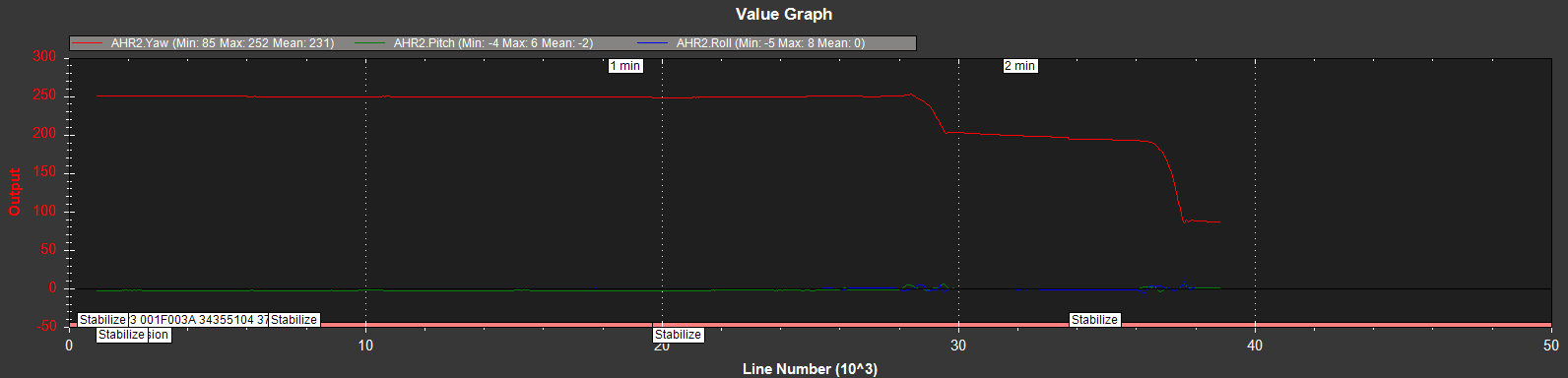
And see graph, YAW output is about 250 ROLL+ PITCH 0.
Stick input on all axis 0.
Looks like it’s not just yaw. All attitude control is backwards. Check your motor wiring here: http://ardupilot.org/copter/docs/connect-escs-and-motors.html
It moves just ok on pitch and rol. Have checked motor order = ok
System is stable, just yaw not ok.
Radio calibration done.
Gyro and compass calibration ok.
Know, the autopilot is mounted upside down, using external compass with normal mount. AHRS orientation is set to 180 roll.
Maybe a compass - motor calibration for inclination correction?
You’re running bog stock PIDs.An autotune will make a difference.Two autotunes will make more of a difference.You’re running a release candidate firmware as well.
Also check the motors are all running exactly in the same plane.A couple of degrees twist can make a difference.
In your graph the YAW is represeted in degrees from north.
Check the trim sliders on the TX.
It looks like your motor directions are backwards. Motors 1, 2, 7 and 8 should be CW and motors 3, 4, 5, and 6 should be CCW.
Look at roughly 1:45 into the log where the craft yaws from about 250 degrees to 200 degrees.
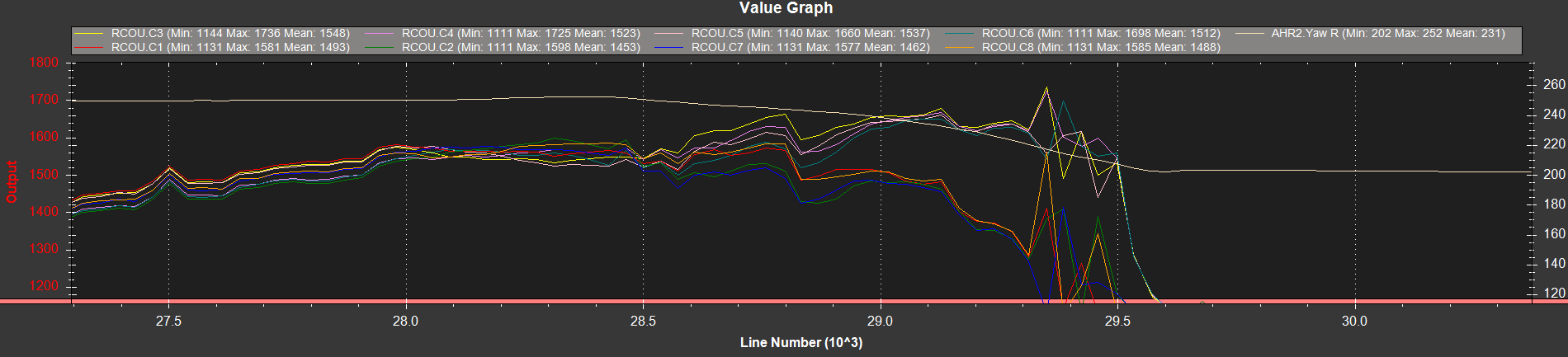
the CW motors (1, 2, 7, 8) go low and the CCW motors (3, 4, 5, 6) go high. This should cause the craft to yaw in the CW direction - but it went CCW.
So, motor 1 is connected to motor 1, etc… but they are all spinning backwards.
All checked. CW / CCW order and numbering is correct.
Well the compass is indicating that it is yawing in the opposite direction of what the motors are being commanded. If you are sure about the motor directions, I would check your compass. Just connect to MP and verify that your heading is correct when you turn the craft .
One day later. Have checked everything and found nothing wrong,
Installed latest firmware. Calibrated compass, IMU. No difference.
Heading when moving ok, No Mismatch. When taking off, I am able to do pitch and roll. System is very well aligned.
Stable for a few seconds and then starts to yaw and correcting this in the wrong direction ending in a kind of a loop.
Post another log. From your 1st log it seems unresponsive to yaw input (RCIN ch4) yet it’s tracking Desired (commanded) Yaw.
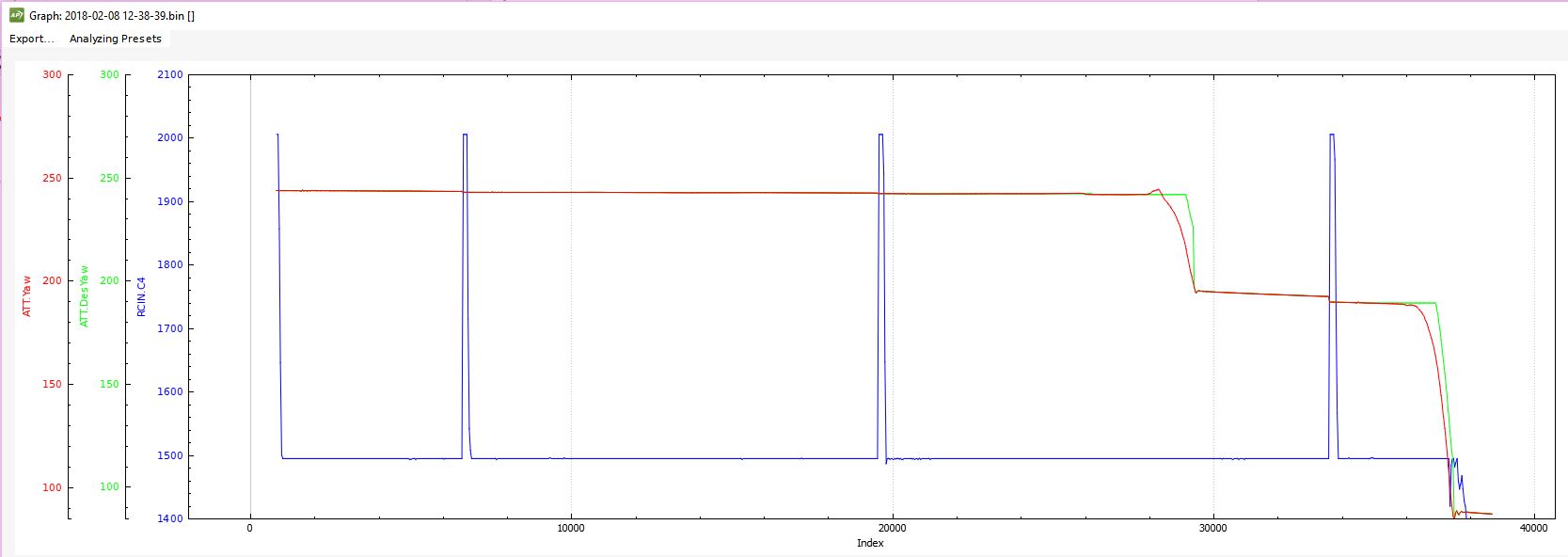
Strange behavior of RCIN ch4 indeed when trying to compensate drift on RC.
see new bin file link https://1drv.ms/u/s!AsyuUF9kIzhqgpV3CVkudZFfZIingA
This is more of the same except you have full yaw stick travel in both directions with little to no correlation to actual yaw. But in addition to that your Desire Roll/Roll and Desired Pitch/Pitch is out of whack. You have said you checked the motor order and prop direction but something is not right. I just noticed the baro, what was this “flight”?
I want to see a log of this claim your roll and pitch are normal.
How about some detailed pics of your setup?
Have resetted all parm and calibrated all sensors.
Didn’t help. Please see link to last log https://1drv.ms/u/s!AsyuUF9kIzhqgpV6yybhQZfjjZylQA
Pixhawk Cube is mounted inside upside down point forward (AHRS_ORIENT = 8 (180 degrees roll))
Only uses external compass (Here+)
The engines are mounted with a + and - 3 degrees offset. If this is done to the wrong side, I suppose the aircraft wil never be able to turn in the right direction and will start to fight against itself. I think I have overseen a fundamental hardware mounting fault!. Just checking before I will exchange the rotor arms.
I noticed that.It’s set up for a DJI controller.The offset is part of their motor failure recovery system.I’m not sure if Pixhawk can handle that configuration.All my motors are mounted on a flat plane.
Something is fundamentally wrong from that log and hopefully it’s the motor angles.
Nice frame.
Problem solved! Wrong motor offset angle. Mixed up the + & - 3 degrees positions. Amazing how it’s performance is now! Thanks for all the support!