I had my new craft up for the first time today. I had to first correct motor numbering/wiring at the field and then well all good. The craft took off in PosHold and held a position just fine with the stock PIDs. All of a sudden, the craft started rolling back and forth, and could no longer maintain altitude and crash landed. I attached a zipped DataFlash log .bin file for someone better at diagnosing these things to take a look at. Thanks.
No log attached. Link to where it’s at as they are typically too large to attached directly.
logfile is here:
https://drive.google.com/file/d/1u0MBhvEieB32ySl-daJY8Un64Ny7YBdL/view?usp=sharing
UPDATE: public share link updated
That drive requires access permission. A bit a pain for this purpose…
fixed, the link is. hmm.
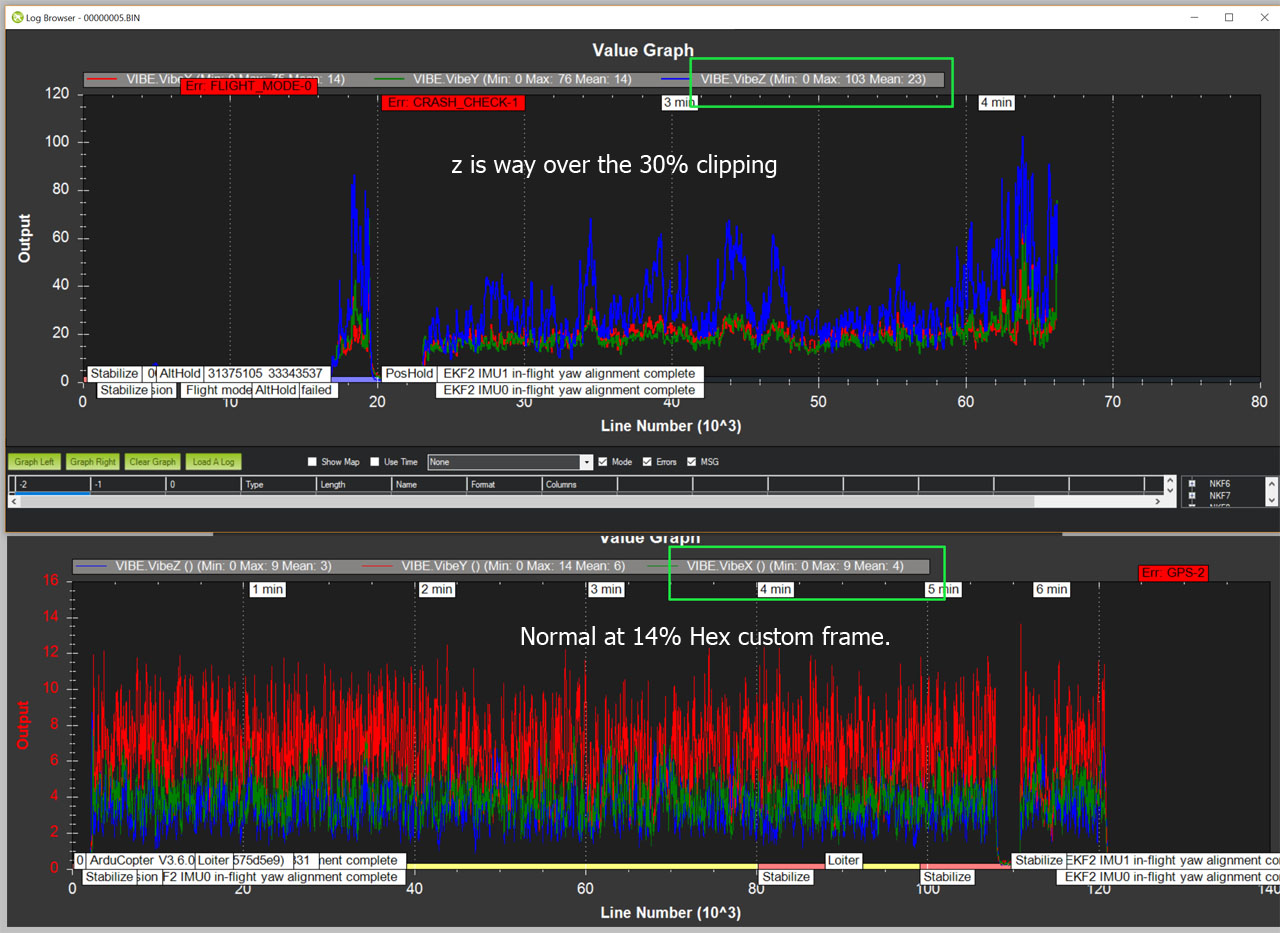
Z-axis vibes are high, clipping indicated. 2 motors are almost maxed out (underpowered?) and motor balance is off and the tuning is poor or it could just be the high vibes. Describe this quad.
It’s a bit of a Frankenquad. It’s a Tarot X4 with customized motor mounts to accommodate the TMotor U8-170’s 30mm mounting pattern. They are also elongated to bring the craft up to a 1000mm wheelbase. This also allows for 26" CF props. TMotor Air 40a ESCs. The AUW with gimbal and a pair of 16000 6S LiPos is 10.75kg.
Here’s a pic. Uploading from phone doesn’t want to work.
https://flic.kr/p/28vayXn
The 8000 LiPos are balast to mimic the gimbal
You say “a pair of 16000 6S” and “8000 Lipos”. What is the battery arrangement and capacity?
With such a large multi I think the 1st thing you want to do is lower the Rate Pitch and Roll filters to 10 from the default 20. I can’t say I have experience with a craft that large but there is a lot of posted advice about this.
The power for the craft is a pair of 16000mAh 6S LiPos in parallel (6S2P). The 8000mAh 6S LiPos under the craft are there just for weight; didn’t want to maiden with the gimbal attached. As for power, if you believe xCopterCalc, it should get a decent flight time. Where were you looking in the log file to see what you saw? Thanks.

Z vib is very high recommend hard mounting FC and not on the isolated plate. I do not think having components on the same plate is a good idea as the GPS mast and components vibration in flight with transfer to the Cube like a micro springboard x and y vibration seem better. I also recommend to look at the GPS wire for movement possibly zip tie it down. rigid vrs damping I go with rigid first.
OK, got it. I wouldn’t worry about flight time, look at your predicted hover throttle linear %. You want that somewhere ~50% (or less).
it’s too heavy for that configuration and yes I saw that in the log. Look at motor output during your climb.
The log shows what eCalc predicts:
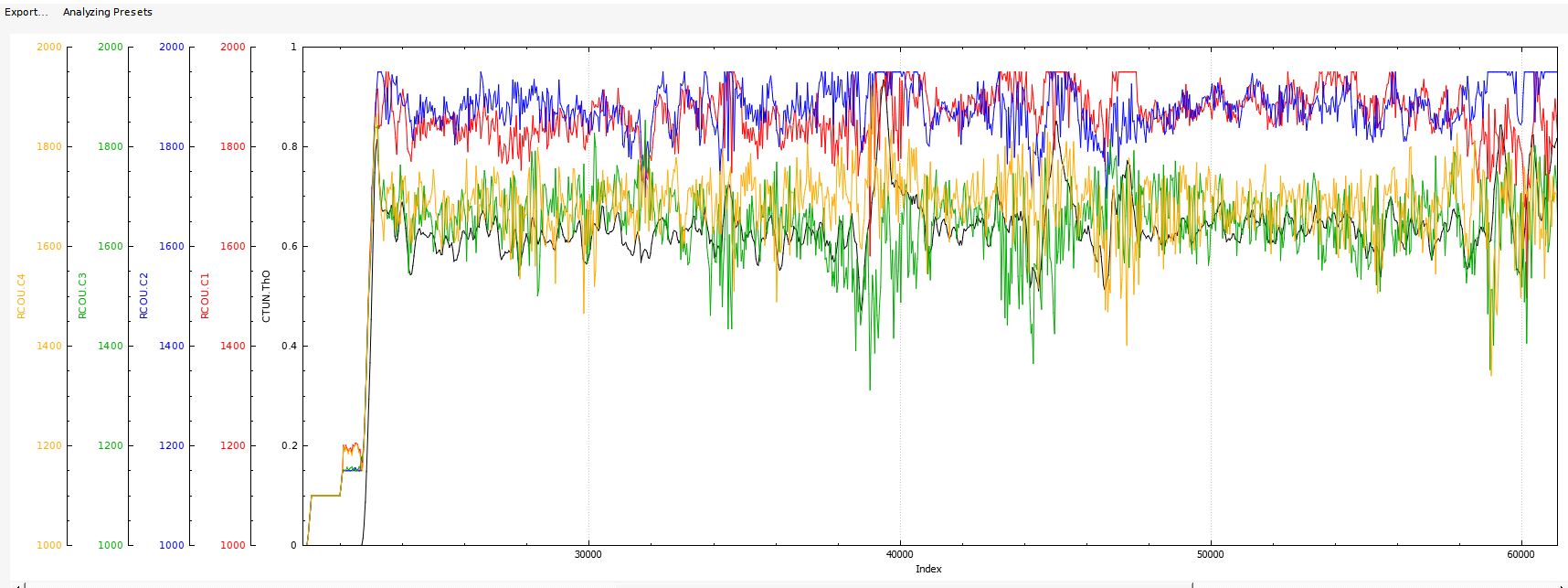
@dkemxr What did you use to produce that graph? I’ve been looking at the data using MP. Also, if I go to an X8 configuration using the same motor/esc/prop and leave the LiPos at 16000 6S2P, eCalc shows Throttle (log) at 47% and Throttle (linear) at 59% which is closer to being in line with what your saying. If I drop down to a pair of 12000mAh 6S LiPos, the predicted throttle values drop to 43% and 56% respectively. Still a bit higher than your suggested 50% max. What is another option; larger motors? I would think at some point, the Tarot frame won’t support the added arm weight.
APM Planner. It does a much better job with multiple Y-axis graphs. With your motors maxed out it has no headroom for stability control. That’s why it’s best to have enough thrust to hover ~ mid-throttle. It’s the single best design criteria to use in eCalc when selecting components. If you go the X8 route it will gain 1kg from the motors plus the props and ESC’s so maybe ~58% which might work but you have a point about the arms and the weight. It could be a shaking nightmare impossible to tune.
Now that I know that the baseline design criteria needs to be, I can work from there. Further, I learned more about reading logs too. Thanks!
“if you believe xCopterCalc.” your suspicions are not unwarranted. Here is the vibration log the one that crashed and a good example. BTW two weeks ago a users craft did the same thing he had his Cube soft mounted. Phillup is very clear about mounting the FC.
It never occurred to me that the rubber was acting as an isolator. I’m quite aware of the need to hard-mount; I thought I was. OK. I ordered some replacement parts, but it’s going to need more than new arms to be successful. Thanks!