Hi all
Im using Mad APEX 4 - 14S 40A ESC with CUAV v5+ on arducopter 4.3.3
When descending using throttle stick in alt hold mode the copter wobble too much.
I have reduced motor thrust expo to 0.4 value to see the difference but same result…
Then i contacts mad technical support and they saying that arducopter sends too long Signals 319.5 milliseconds .
But those ESC support only 800microsecond to 2.5 milliseconds.
Thats why esc is not sync with flight controller.
This sounds like nonsense to me. Ardupilot supports many ESC protocols. Not that I think it matters here as it’s likely a matter of tuning but what protocols does that ESC support?
I agree with @dkemxr that it is unlikely to be the rate at which the autopilot is sending the PWM signals and much more likely to be tuning.
By the way, AP normally outputs at 400hz which is every 2.5ms so it is hard to imagine where the “319.5ms” comment comes from. I suspect a typo because that would only be a little more than 3hz which would never work.
@rmackay9@Leonardthall
im not saying that its Flight controller update rate problem.absolutely there is a 100% tuning issue before proceeding to tuning process i want to know whether its ESC issue.
when i raise this issue with MAD ESC Manufactures they were said this ardupilot has this issue, that’s why want to confirm with experts.
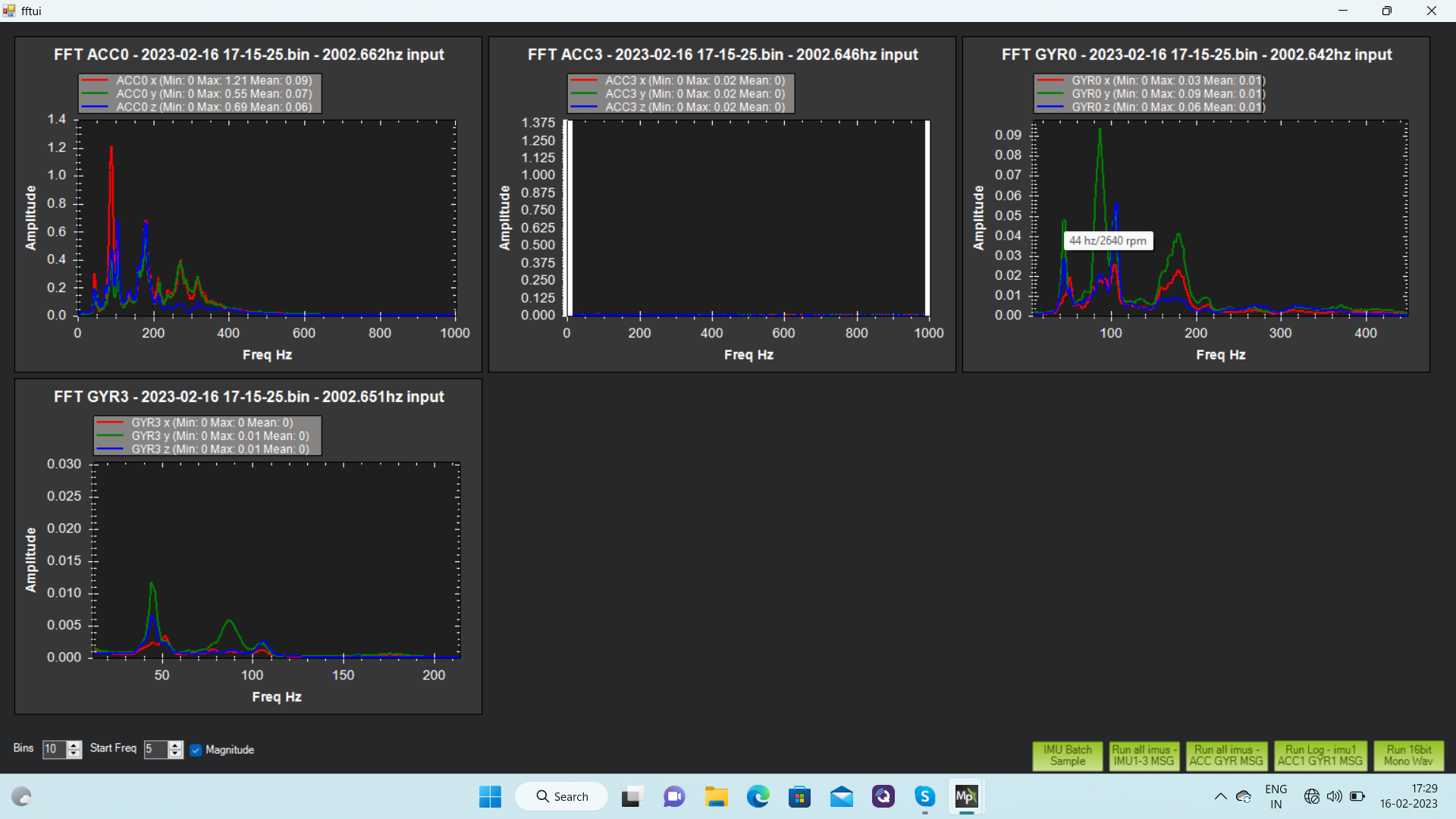
It looks as if you’re on initial parameters. The notch filter has not been set. The PIDs are not tuned. The vibration levels are high and there are clipping events.
You should look into reducing vibrations. Z vibrations, so look at your prop track, arm mounting, loose landing gear, and any wires that may be vibrating on the FC.
Set INS_LOG_BAT_OPT,4 and INS_LOG_BAT_MASK,1 so you can collect the data to set the notch filter.
Perform another simple hover flight for about 30 seconds or a minute in Alt-Hold to get the data. Post the log and somebody here can help with the next steps.
The tune on this craft is terrible and Vibes are high with 1000’s of clipping events.
Suggest you read thru the entire tuning guide as per the link posted, fix what’s wrong and then come back with issues other than basic tuning problems.
Once vibrations are fixed, set these to start gathering more information
INS_ACCEL_FILTER,10
INS_HNTCH_ENABLE,1 ← set this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.21
INS_HNTCH_FREQ,40
INS_HNTCH_BW,20
INS_HNTCH_FM_RAT,0.7
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
And I would highly recommend setting this for any copter bigger than a small racing quad.
FENCE_ENABLE,1
EDIT: Also connect to the Initial Parameters section in MissionPlanner, type in your prop size, battery cells and chemistry. Accept everything it offers.
This will fix up some Gyro and filter settings that will help in the long run.
Hi all
Sorry for making too long to time to address here again. After long time i had time to test the QUAD again with all your Suggested parameter and followed mission planner initial parameter.
after initial parameter flight log i have configured hormonic Notch and flew again with other parameter changes
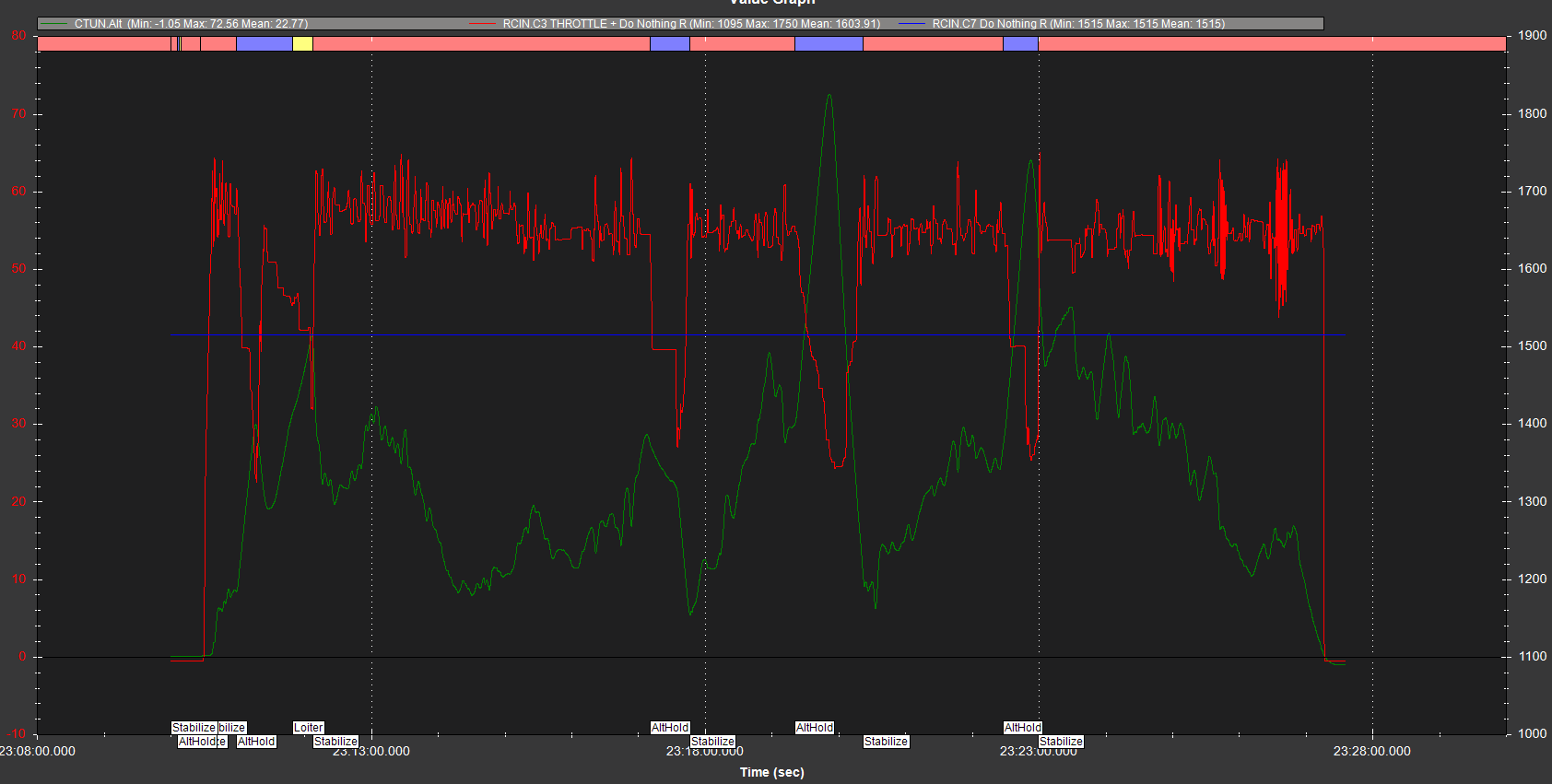
but Still i couldn’t able to control the drone in ALTHOLD .its not maintaining height when i kept throttle stick Centre ,instead keep increasing height and doesn’t stop at all.
when i decrease the throttle its keep descend but when i kept throttle stick to Centre the drone descend doesn’t stop then i changed flight mode STABLIZE mode to take control.
i have tried MOT_THST_EXPO to 0.2 and 0.4 for same drone but does not solve the issue.
totally its uncontrollable in Height in all mode.
vibration has been reduced absolutely and no EKF issue too.
ESC Calibrated .
RC transmitter also calibrated well before the flight.
The problem with the copter rising is the RC input.
Throttle is never centered and only goes below centre when you are trying to reduce altitude. I’ve added an unused channel to this graph so you can see where the centre line is.
Set these:
INS_HNTCH_FM_RAT,0.7
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
I’m not sure about those ESCs, they seem to be some cheap T-Motor Alpha copy, unsure…
Some sources say “1050us-1940us” so you would want
MOT_PWM_MIN,1050
MOT_PWM_MAX,1940
and probably standard calculated expo for your prop size
MOT_THST_EXPO,0.76
and set MOT_THST_HOVER,0.2 to the default value and let it relearn.
Personally, with 22inch props I’d be looking for an ESC (and maybe motors too) that I could really rely on.