Hi all,
I am facing some problems setting up a u-blox NEO-M8P RTK system with a separate telemetry connection. It consists of:
- Tiny RTK GPS (NEO-M8P Base)
- XL RTK GPS (NEO-M8P Rover)
- 3DR/SIK 433MHz telemetry
I configured everything following: https://drotek.com/en/documentation/tiny-rtk-documentation/#integration-dropixpixhawk-2
After some issues described below I upgraded the firmware of both the rover and the base, configured everything again from scratch and verified every configuration step.
The issues:
i) Different(wrong) HDOP report in Mission Planner compared to uCenter
ii) Unclear baurate settings
iii) Telemetry settings and requirements
i) Different(wrong) HDOP report in Mission Planner compared to uCenter
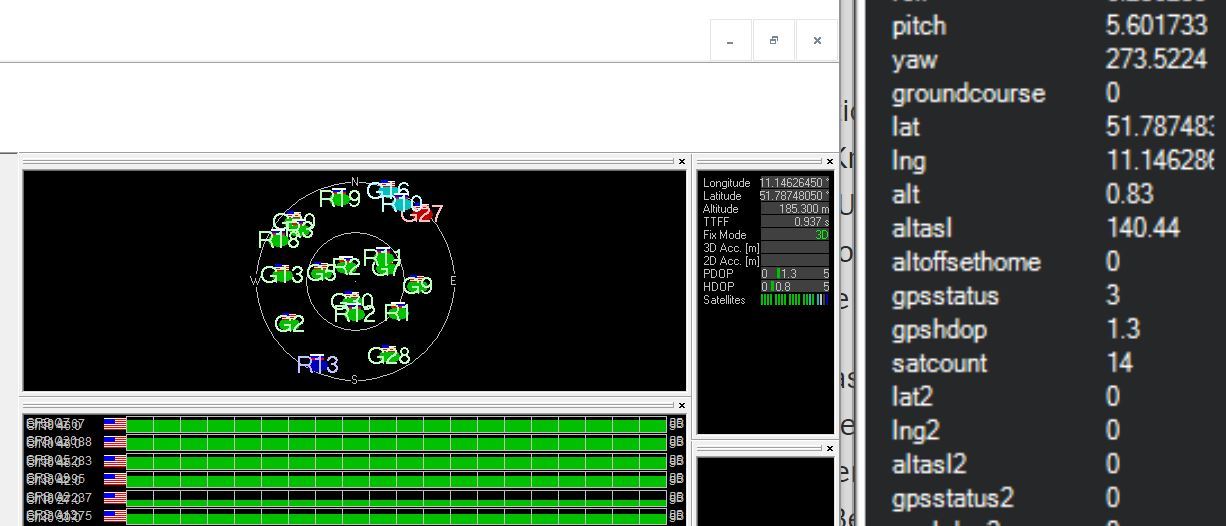
As a first test after configurating the modules I went on the roof and checked the status on the M8P rover connected to an Ardupilot-Pixracer in Mission Planner. I was confuesed by the high HDOP of 1.88 even after 10 min or so. Then I plugged in a normal Drotek M8N XL GPS. Then the HDOP was down in the normal region of 0.7-0.8. After updating the fimeware and I think with the addition of Baidu the HDOP of the M8P Rover went down to 1.15. Still much higher compared to the M8N. Connecting the M8P Rover to uCenter the HDOP was down to 0.7. The PDOP which is usually about twice as high as the HDOP was at 1.2. So there seems to be something wrong in the communication between the M8P Rover and Mission Planner/Ardupilot. It seems it shows the PDOP and not the HDOP.
Model Software Sat count HDOP
Test 1:
M8P(1.0) MP 12 1.88
M8N MP 18 0.76
Test2:
M8P(1.3) MP 18 1.15
M8P(1.3) uCenter 18? 0.7 PDOP 1.2
ii) Unclear baurate settings
At https://drotek.com/en/documentation/tiny-rtk-documentation/#integration-dropixpixhawk-2
it is stated that:
There make sure to select your flight controller’s GPS baudrate (38400 for Pixhawk) and click on Send.
and
Make sure your datalink is also configured to work at 38400 baudrate on rover side!
If I set the baudrate to 38400, Ardupilot (3.5rc2) is not detecting the M8P Rover module. But when I set it to 115200 it does.
As far as I remember all M8 GPS are currently running at a baudrate of 115200. If this is a must, then the telemetry should run at 115 as well. Is this correct? If the 115 is not a must in Ardupilot and if there are no sacrifices in reducing it, the question is what is better for an M8P setup - 57600 or 38400?
iii) Telemetry settings and requirements
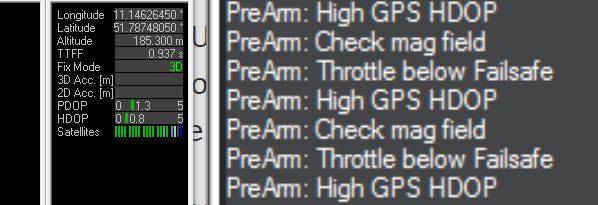
I have not managed any RTK fix in the setup so far. The telemetries are communiacting with each other, but I am not sure if they commuicate properly with the GPS modules. This might be due to the baurate settings.
My first question here is what is the best way to test if the system works? Do I see it in uCenter or Mission Planner?
Second, what are the requirements for the normal SIK 433MHz telemetry in terms of duty cycle when running a M8P RTK setup?
Thanks a lot in advance,
Thorsten
PS: cross-posted at https://forum.drotek.com/t/issues-with-hdop-baudrate-telemetry/
 With a reasonably new ArduPilot firmware (for Copter 3.5rc1 onwards) you don’t have to deal with any of that shenanigans. Just connect the GPS to the pixhawk, enable auto config, and allow mission planner to configure and inject data from your base.
With a reasonably new ArduPilot firmware (for Copter 3.5rc1 onwards) you don’t have to deal with any of that shenanigans. Just connect the GPS to the pixhawk, enable auto config, and allow mission planner to configure and inject data from your base.