Home
Blog
Stores
Docs
Copter
Plane
Rover
Sub
ArduPilot Discourse
Lowrance bi-directional sonar and nmea GPS working
ArduRover
ArduBoat
aussiemaverick
(aussiemaverick)
December 23, 2022, 6:15am
3
1
1920×2560 469 KB
2
1920×2560 415 KB
3
1920×2560 399 KB
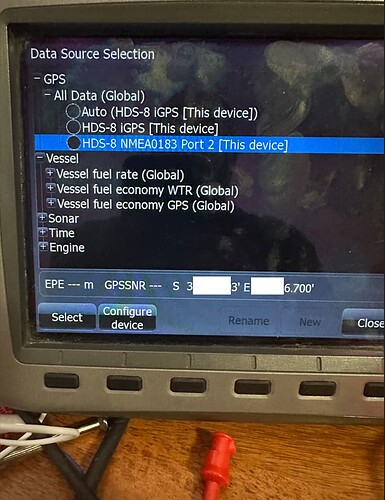
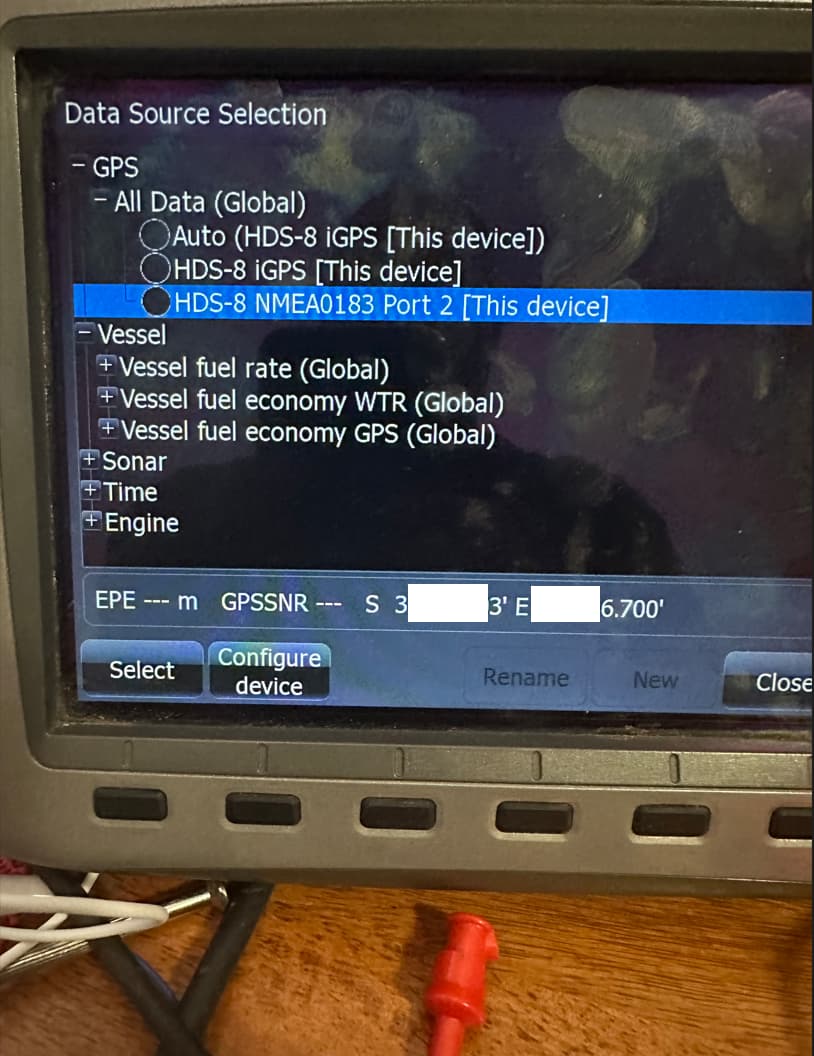
4-gps-select
814×1056 89.6 KB
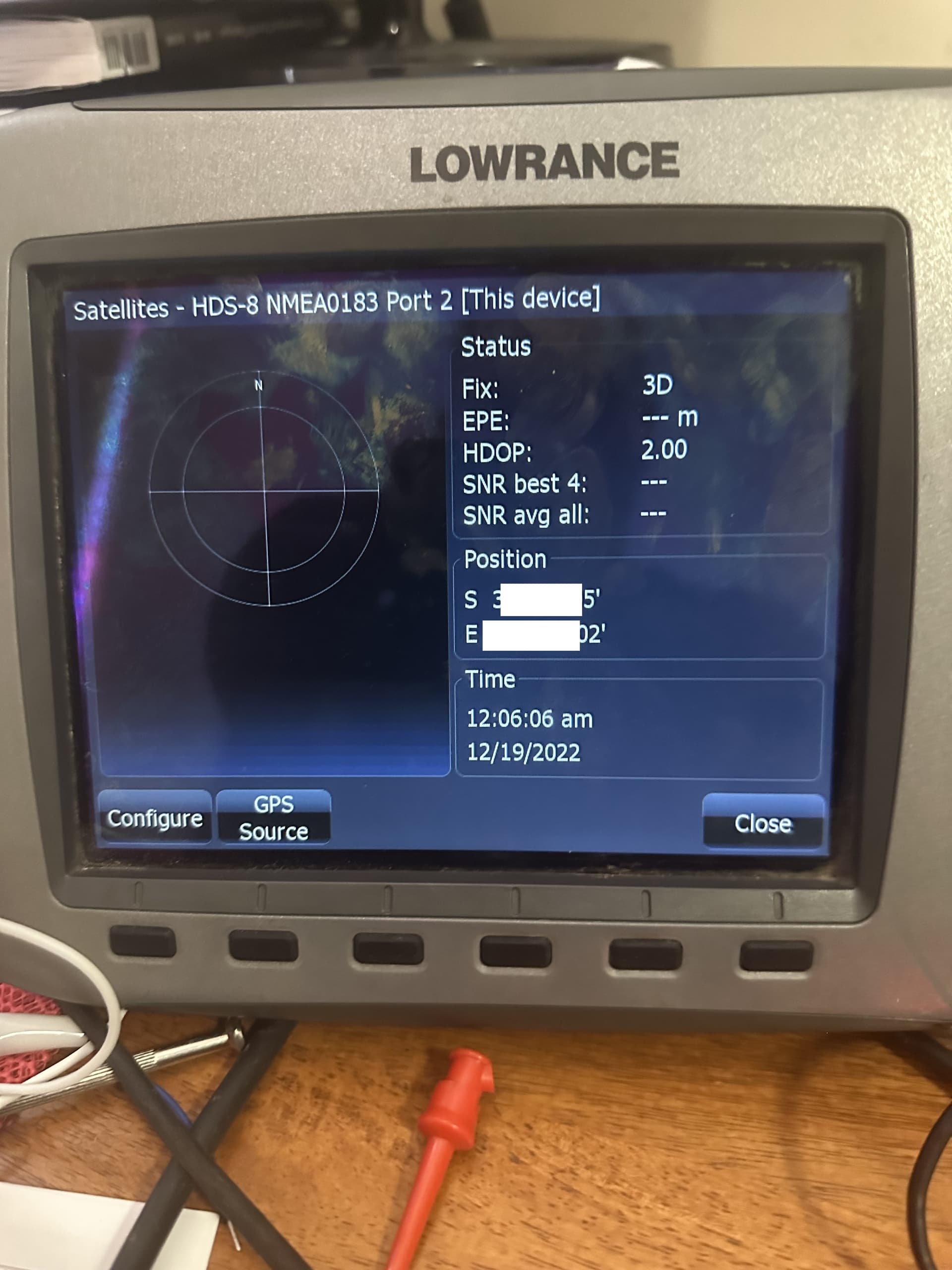
5
1920×2560 246 KB
1 Like
Bathymatric mapping --urgent help--
show post in topic