Hy everyone, iam happy can signed into this forum.
I have horrible problem : my quadcopter which is powered by :
Pixhawk FC
Pixhawk SE100 GPS
ESC 80A
Brushless motor 360kv
Telemetry 915mhz
Use case : for mini sprayer ( 1 liter capacity )
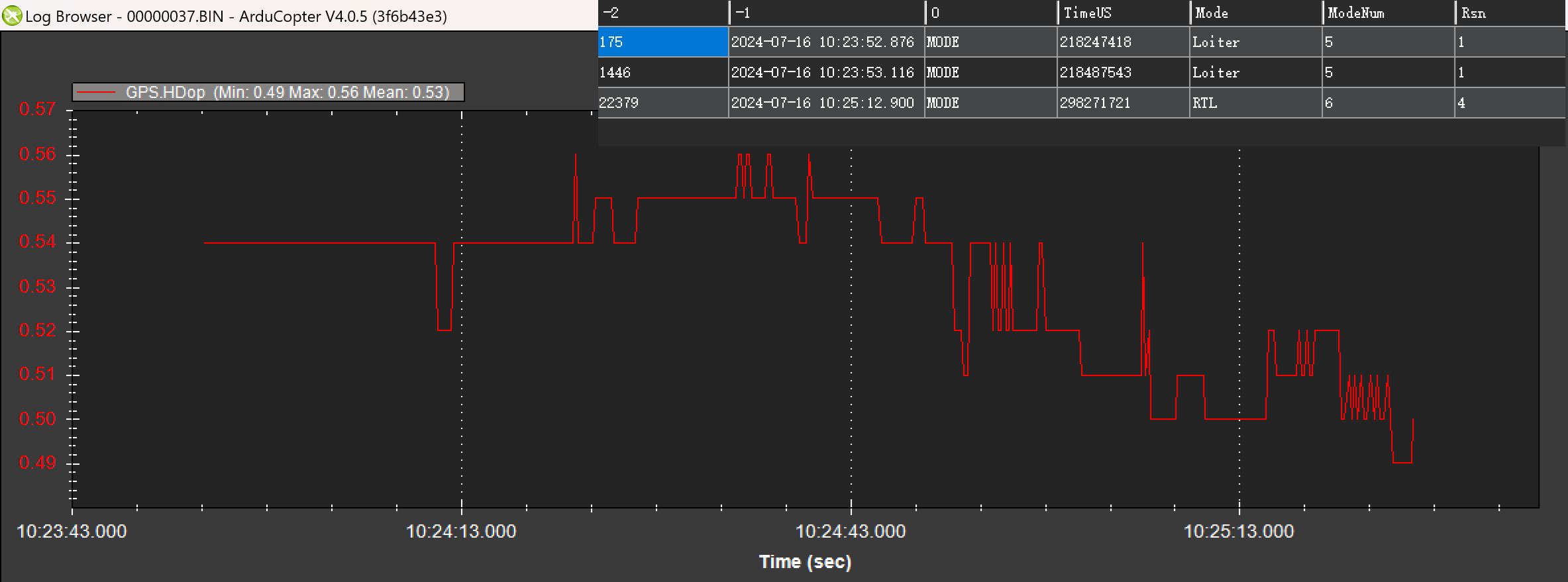
I just facing problem last couple hour , I fly my drone in the open field ( loiter mode ) everything seem good but after few minute its climb not controllable /fly away, then i switch it to RTL mode and no respones finally i switch the throttle off ( cut off ) emergency shut down
Here is my log file , please help me to solve this , i will really appreciate it 00000037.BIN (1000 KB)
hy lida thanks for your response, so my quad get into failsafe automatically? is it that cause it to climb? i wil recheck these , do you find any other interefernce like vibration or else in my log?