Trex 800 with DDFP tail, running Arducopter 4.1.2. I lose control while doing piro and try to travel any direction at the same time. I tried this with Loiter and stabilize in simple mode. I’m not a 3D pilot so I can’t do it in Acro mode. Almost crashed trying to do it twice. Any reason for loss of control?
How should anybody know what you and your heli did as you don’t show any details.
A log file of that flights should be helpfull
Well, at least I have a guess. I’m also flying a T-Rex 800 with ArduPilot and had some instability issues doing piros in loiter. The problem was caused by the GPS unit not being installed in the CG.
Try filling in
GPS_POS1_X, GPS_POS1_Y, GPS_POS1_Z
GPS_POS2_X, GPS_POS2_Y, GPS_POS2_Z
with respect to the CG.
Since you’re also experiencing the problem in stabilize mode, please check, if the position of your flight controller (also measured from the CG) is filled in correctly:
INS_POS1_X, INS_POS1_Y, INS_POS1_Z
INS_POS2_X, INS_POS2_Y, INS_POS2_Z
INS_POS3_X, INS_POS3_Y, INS_POS3_Z
If you need more information about how to do that, just read this page:
https://ardupilot.org/copter/docs/common-sensor-offset-compensation.html
I hope, that solves your problem.
Thank you Felix, I’ll try your suggestion.
Attached the log file of the crash I caused ( accidently disengaged the interlock) when I lost control. the other log is a successful piro without travel.
2024-02-01 Travling Piro CRASH.bin - Google Drive, 2024-03-12 Piro_No travel.bin - Google Drive
Hi John,
thanks for sharing your logs. In your first file I can see a pretty severe spiral movement. I still think, this was caused by the IMU not knowing that it’s not mounted in the CG. What were the values you used for the INS_POS parameters at that time?
You should also check your compass calibration, as the effect you saw, could also be some kind of toilet bowling. Place your vehicle on the ground and point the nose exactly towards a clearly visible landmark like a big tree. Then check on the map of your GCS if the line is also pointing towards that landmark. If the deviation is more than a few degrees, you should recalibrate your compass. Repeat that step for different directions.
When you’re done with both things (filling in the distance of the IMU/GPS from the CG and checking your compass calibration), I’m pretty confident, that your helicopter will behave just like expected.
Hi @JohnO ,
first of all welcome, I would suggest you upgade to latest stable release as there are important implementations-especially for DDFP tails.
I think it would help relocating a recalibrating your compass, look at the magnetic variance:
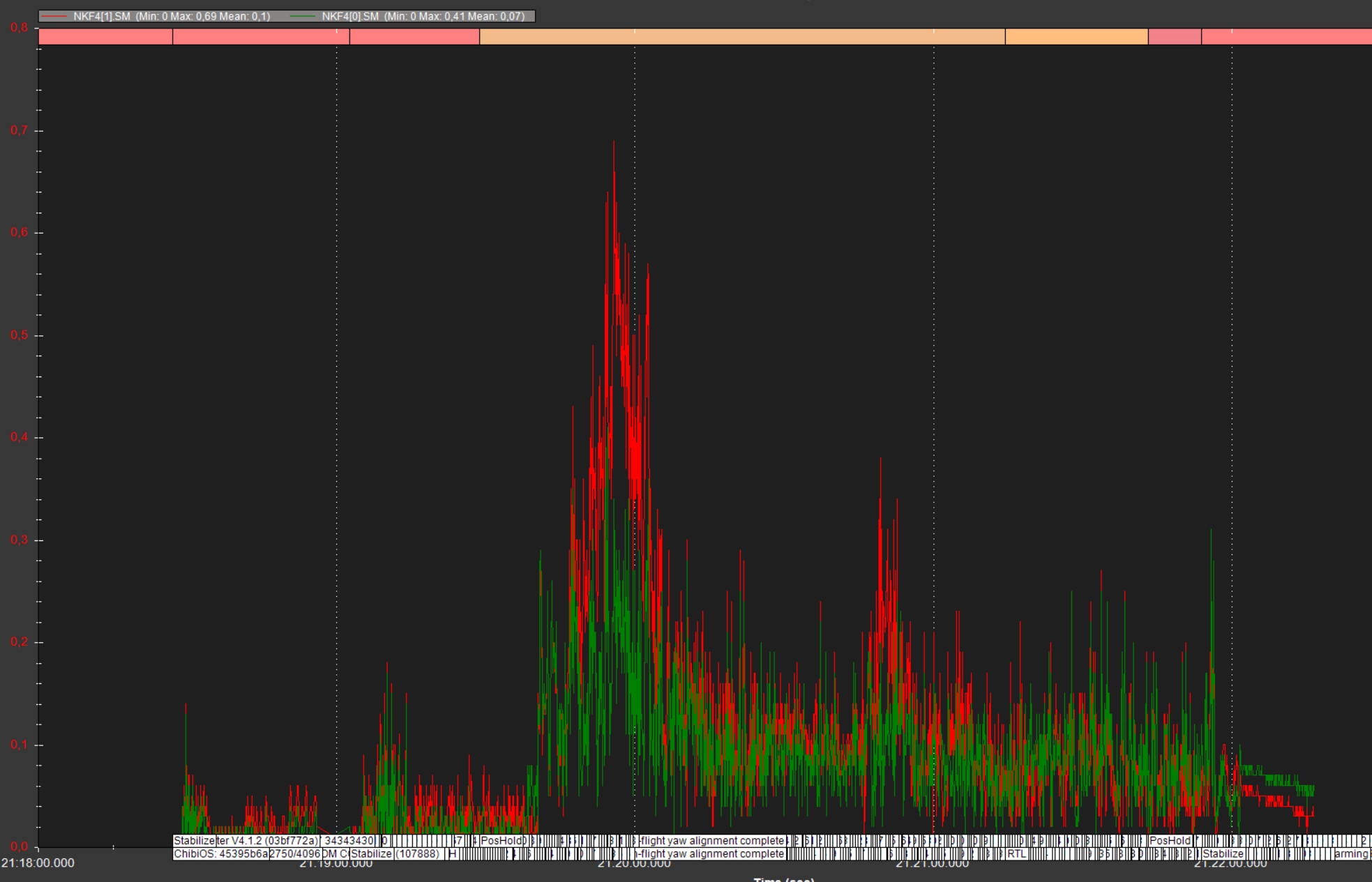
Also, I would suggest to review the tuning on roll and yaw axis.
1 Like
Thank you all for your warm welcome and prompt reply. Will keep you updated with my progress following your suggestions,