Hi everyone,
I recently had my plane crash after switching out of RTL mode. The plane stopped responding to control inputs. It seemed as if the control surfaces were locked in one position and were not moving. This resulted in a gradual roll to the left with some down elevator.
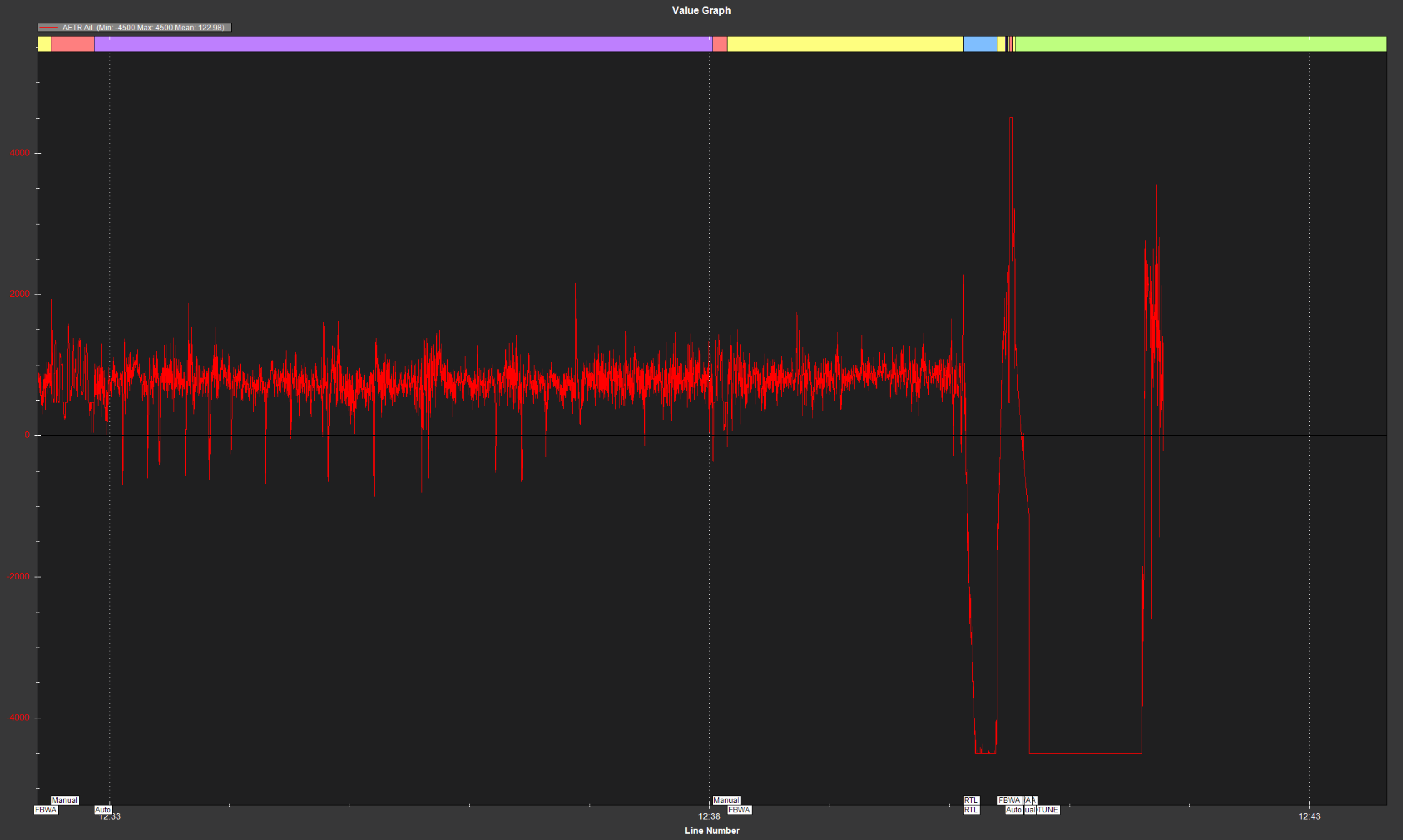
The plane had returned to launch and was halfway through its first circle when I switched from RTL to FBWA. In FBWA the plane did not level itself or respond to control inputs. As it would not respond, I flicked RTL on and off again, but still had no control. I then tried MANUAL and FBWA, still no control. The result was an inverted 60deg nose down impact at about 95km/h. It was quite an impressive crash to see really 
I am not sure of my abilities to interpret the log, however, to me it seems that my RC inputs were recognized, it also seems that there were servo outputs but I am not sure if they match the RC inputs. I reasonably sure that the servo outputs don’t match my inputs when in MANUAL mode though. Although there were servo outputs, there did not seem to be roll and pitch changes corresponding to the servo outputs. But as I said I don’t think I am very good at interpreting the log so I am hoping someone might be able to help track down the issue.
After the crash I had a look at mechanical issues, like servo to elevon connections or unplugged servos but did not find anything. Besides, I don’t think it was a hardware failure because when one control surface stops working on a flying wing, pitch inputs cause the plane to roll. Which did not happen. The crash was a continuous gentle roll.
The FC is a Matek Sys H743 v2 and it’s on a flying wing.
RCIN C1 = Roll
RCIN C2 = Pitch
RCIN C3 =Throttle
RCOU C1 = Throttle
RCOU C2 = Elevon Left
RCOU C3 =Elevon Right
Things to note about the log:
You will see that at about 12:40:31 the plane is in a nose dive and there is a large pitch down RC input. This was deliberate, the plane had rolled inverted at this point and down elevator would have been the fastest way to avoid the ground… if it was responding to control inputs 
I have my modes setup on two switches on my radio. Both switches are three position switches.
Switch A positions are: MANUAL - FBWA - AUTOTUNE.
Switch B positions are: OFF - AUTO - RTL.
When switch B is set to OFF, switch A is active. But when switch B is on AUTO or RTL it overrides what ever switch A is set to. I am only explaining this so the mode changes in the datalog might make sense. You will see in the log that AUTO is on for a brief period when switching in and out of RTL.
If anyone has an ideas or could point me in a direction it would be greatly appreciated.
I could not attach the log file as it was too large so I have put the log and param files in the OneDrive folder below. Let me know if you cant open it or want the files by another means.
Cheers